XiaoMi-AI文件搜索系统
World File Search System滑动
KeyseCure®5&6KeyseCure®5&6
5。安装电池(带有发货的电池):卸下塑料电路板盖b。在电路板的右上角找到电池插座c。滑动电池,朝外边缘的正(+)端子朝向电池插座d。更换电路板盖e。在后盖上安装/重新安装

未绝育公狗的不良行为!
尖头项圈或夹颈项圈一直备受争议。它可能看起来像中世纪的酷刑装置,但在训练中确实有其用武之地。对触摸极其不敏感和/或皮毛厚或容易分心的狗可能会受益于比滑动项圈或带扣项圈更能传达信息的项圈。缺乏力量和身材的人也可能会发现使用尖头项圈(或头笼头)进行训练以获得初步控制更容易。项圈中的链环数量必须始终允许项圈完全闭合而不会对狗的皮肤施加过大的压力。链环太少会刺破狗的脖子,链环太多会使它成为无用的工具。一旦训练超出了基本控制范围,大多数狗都可以逐渐使用滑动项圈,最后使用带扣项圈。可以把这些工具想象成许多人在自行车上使用的辅助轮——临时的。
Bourns® 电位器
20 世纪早期的滑线变阻器 19 世纪的碳堆 20 世纪早期的碳堆 简单的滑线可变电阻装置 确定未知电压的测量仪器 用于精密比值测量的现代仪器 专利图(或 100 多年前发明的装置) 20 世纪早期的专利图 A. O. Beckman 的 10 圈电位计专利图 MarIan E. B ourns 的微型调节电位计专利图 当今的调节电位计 在绝缘管上缠绕电阻丝 可以使用扁平心轴 弯曲心轴节省空间并允许旋转控制 将心轴塑造成螺旋状可在小空间内增加长度 复合材料的电阻元件 简单的导螺杆有助于可设置性 可以在旋转电位计中添加蜗轮 简单的滑动接触位置指示装置 用于滑动接触位置指示的精确装置 通用名称
医学大楼Drimmer Labs Rooms
Drimmer Family Lab(MSB 113、117和120)是一个大的学习空间,可以通过滑动墙板将其分为三个单独的房间。在学习空间中,有三个不同的AV机架,每个架子都带有PC,直接笔记本电脑输入以及笔记本电脑和移动设备的无线视频。

Mk 45舰炮系统
1 炮盾 • 铝制外壳,用于对火炮部件进行防风雨、防弹和防生化防护。上部结构 [炮室] 在系统运行期间无人值守。 • 支撑检修门、系统通风、液压集管箱和与防护罩一体的减压缓冲器。 2 枪尾 • 固定炮管内的子弹以便射击,连接电动击针,并在射击时容纳爆炸压力。 3 炮口防护罩 • 提供动态外壳,覆盖和密封火炮的仰角弧,并为炮管和弹壳弹出门安装防风雨端口。 4 炮尾机构 • 液压活塞驱动的连杆,用于在射击或哑火事件后升高和降低枪尾和提取推进剂所需的部件。 5 炮管外壳 • 支撑炮管的后膛端。 • 安装后坐和反后坐缸,以及阀控气体喷射系统,以清除炮管中的残留气体。 6 炮架 • 为上部火炮提供底环和耳轴支撑。 • 安装传动机构和仰角动力驱动器、上部蓄能器系统、滑动组件和防护罩。• 为火炮的传动机构和仰角功能提供轴线。7 支架 • 为传动机构轴承和齿轮环的固定部件提供安装在甲板上的平台。8 托架 • 升至火炮仰角轴线,将垂直方向的弹药从上部提升机转移到火炮滑动装置的指向角,以便于后膛装填。9 滑动装置 • 火炮发射部件的主要组件,包括托架、枪尾盖和枪尾机构;火炮身管外壳;空壳提取器和托盘。• 安装火炮仰角轴线的耳轴;安装仰角齿轮扇形装置。

越野自动地面车辆的强大预纳
摘要 - 由于频繁的车轮滑动,变化的车轮半径,并且车辆的3D运动不适合集成车轮速度测量法的2D性质,因此对越野车的状态估算中不常数使用。本文试图通过提出新颖的3D前纳入歧管上的3D前整合来克服这些问题。我们的方法添加 - 在线估计轮式滑移,半径和基线,以提高准确性和鲁棒性。此外,由于预先整合,可以使用车轮滑动和内在的一阶更新将许多测量结果汇总到单个运动约束中,从而可以在基于优化的状态估计框架中有效使用。虽然我们的方法可以与因子图框架中的任何传感器一起使用,但我们验证了其在蒙特卡洛模拟中视觉 - 轮键盘系统(VWO)中参数的有效性和可观察性。此外,我们说明了它的准确性,并证明它可用于在VWO和Visual惯性和视觉惯性轮式(VIWO)系统中在现实世界中的越野场景中克服其他传感器故障。
强大的backstepping-super-twisting-sliding-mode-control- ...
摘要本文重点介绍了自动驾驶车辆的控制问题之后的路径。旨在增强鲁棒性和衰减现象,基于Lyapunov理论开发了一种超级扭转的滑动模式控制算法(STA),其中通过应用倒退技术来提供控制系统稳定性的证明。此外,进行MATLAB/SIMULINK和CARSIM之间的共模拟以验证控制性能后的路径。在这项研究中,Stanley控制器,常规滑动模式控制(SMC)和模型预测控制(MPC)用作评估提出的STA性能的基准控制器。在模拟中考虑了两种驾驶场景,包括正常驾驶和猛烈驾驶。全面评估控制绩效和控制工作(即转向的大小),新颖地提供了一个集成和加权性能评估指数。仿真结果表明,在正常驾驶情况下,所提出的STA的𝐼𝑊𝑃𝐸𝐼可以减少40.5%,25.8%,10.9%;与斯坦利控制器,常规SMC和MPC相比,在激烈的驾驶情况下,在激烈的驾驶情况下有62.5%,24%,6.8%。结果还表明,所提出的STA在颤动的衰减方面优于常规SMC,从而导致前方向盘角度输入更平滑,并且更平滑。与MPC相比,所提出的STA的优点在于其计算复杂性较低。此外,通过更改车辆质量和轮胎参数来验证控制器的鲁棒性。与基准方法相比,所提出的STA可以将𝐼𝑊𝑃𝐸𝐼的波动减少22.6%,22.3%和5.9%。这些结果表明,对系统扰动的考虑对于超级扭转滑动模式控制器的设计至关重要,这可以改善系统后自动驾驶汽车路径的鲁棒性。
使用自动编码器集成二阶滑模控制和异常检测以增强安全性和可靠性
摘要 本文提出了一个综合框架,通过集成二阶滑模控制 (2-SMC) 和基于机器学习和人工智能的先进异常检测和预测系统来提高四旋翼无人机的安全性和可靠性。本文提出了一种新的滑动流形方法,分为两个子系统,用于精确的位置和姿态跟踪,解决了设计四旋翼控制器的挑战。本文还使用 Hurwitz 稳定性分析对滑动流形的非线性系数进行了详细分析。它通过大量的模拟结果证明了所提方法的有效性。为了进一步评估四旋翼的安全性和可靠性,将异常检测和预测系统与位置和姿态跟踪控制相结合。该系统利用机器学习和人工智能技术实时识别和预测异常行为或故障,使四旋翼能够快速有效地应对危急情况。所提出的框架为设计四旋翼无人机的稳健和安全控制器提供了一种有前途的方法。它展示了先进的机器学习和人工智能技术在提高自主系统安全性和可靠性方面的潜力。

飞机轮胎橡胶与粗糙表面之间动态摩擦接触的实验和数值模拟
摘要:本文介绍了一种使用依赖于温度和接触压力的可变摩擦系数对飞机轮胎与粗糙表面接触进行数值模拟的方法。使用滑动装置来评估摩擦系数的这种依赖性。通过热电偶测量整个轮胎横截面的温度扩散。将摩擦生热和温度扩散与数值二维和三维模拟进行了比较。可以获得足够的温度预测。在未来的模拟中,应考虑磨损,以便进行更准确的模拟,特别是在高压和滑动速度的情况下。使用依赖于温度和压力的可变摩擦系数研究了速度为 37.79 节(19.44 米/秒)并处于转弯阶段的滚动轮胎的 3D 有限元模型。数值模拟倾向于预测轮胎胎面在打滑位置滚动几秒钟后的温度,接触区的温度升高到 140 ◦ C。必须进行进一步调查才能获得实验观察到的温度变化。作者想指出,出于保密原因,某些数值数据不能透露。
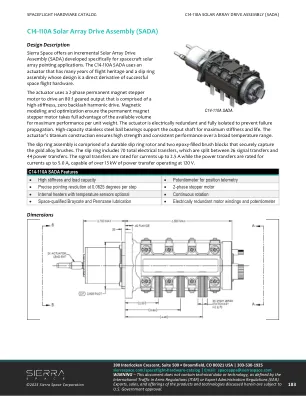
C14-110a太阳能阵列驱动器组件(SADA)
<3.4 kg,包括76.2厘米的飞行铅安全带台阶尺寸0.0625摄氏度调整速率1.0度/s输出扭矩 @ 1.0度/s 11英寸11英寸lb典型在77°F 1.2 nm惯性载荷> 86,452.6 lb-in 2> 25.3 kg-2> 25.3 kg-m 2> 25.3 kg-m 2 360 deg> 0.0 deg> 0.0 0.6 in lbm> 0.6 in lbm> 0.6 in lm> 0.0 nm nm nm nm> 0.0 nm nM电阻52.5Ω(标称,2相)滑动环功率转移44个转移 @ 5.0 AMPS最大滑动环信号传输26转移 @ 2.5安培最大电压28 VDC电压28 VDC电位计的电阻10kΩ合格的热环境温度,运行-31°F至160°F -355°C至71°C温度,2.112 -80°C至96°C注意:此数据仅用于信息,并且可能会更改。联系Sierra空间以获取设计数据。