机构名称:
¥ 1.0
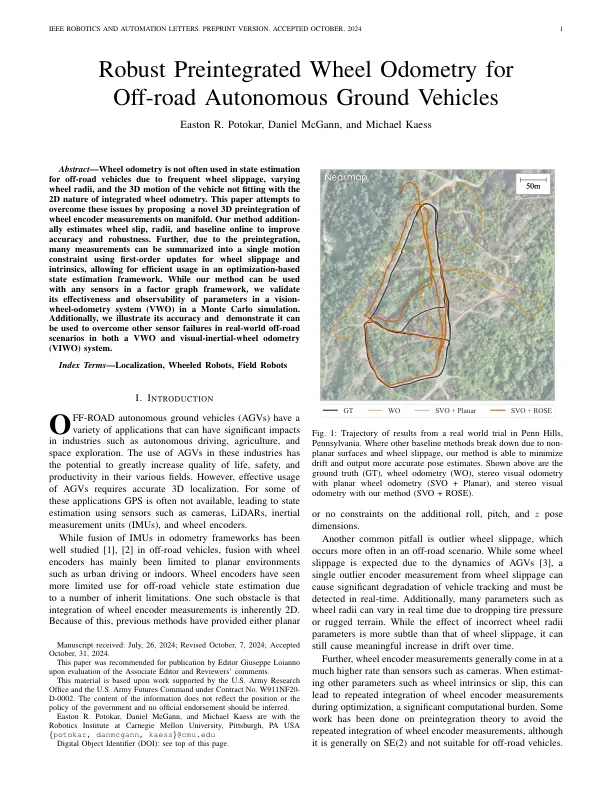
摘要 - 由于频繁的车轮滑动,变化的车轮半径,并且车辆的3D运动不适合集成车轮速度测量法的2D性质,因此对越野车的状态估算中不常数使用。本文试图通过提出新颖的3D前纳入歧管上的3D前整合来克服这些问题。我们的方法添加 - 在线估计轮式滑移,半径和基线,以提高准确性和鲁棒性。此外,由于预先整合,可以使用车轮滑动和内在的一阶更新将许多测量结果汇总到单个运动约束中,从而可以在基于优化的状态估计框架中有效使用。虽然我们的方法可以与因子图框架中的任何传感器一起使用,但我们验证了其在蒙特卡洛模拟中视觉 - 轮键盘系统(VWO)中参数的有效性和可观察性。此外,我们说明了它的准确性,并证明它可用于在VWO和Visual惯性和视觉惯性轮式(VIWO)系统中在现实世界中的越野场景中克服其他传感器故障。
越野自动地面车辆的强大预纳
主要关键词

相关文件推荐