机构名称:
¥ 1.0
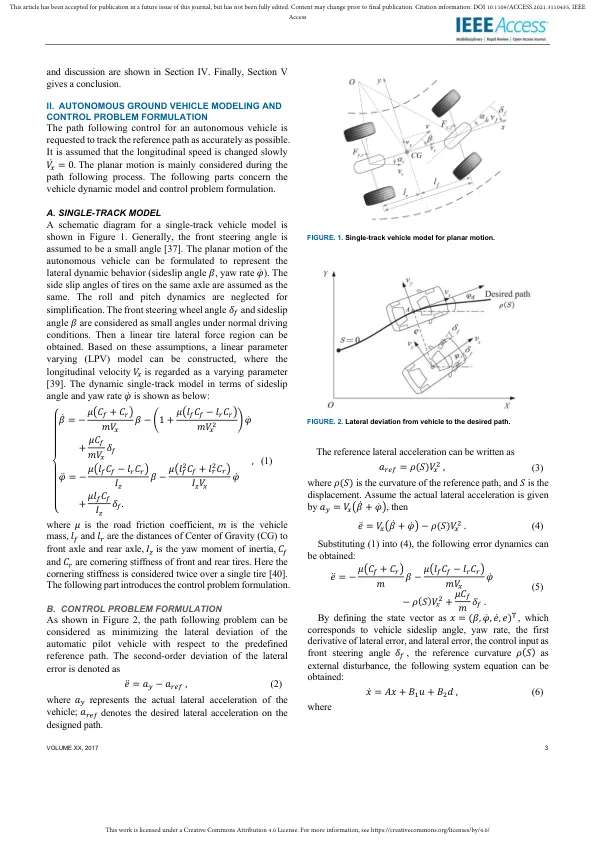
摘要本文重点介绍了自动驾驶车辆的控制问题之后的路径。旨在增强鲁棒性和衰减现象,基于Lyapunov理论开发了一种超级扭转的滑动模式控制算法(STA),其中通过应用倒退技术来提供控制系统稳定性的证明。此外,进行MATLAB/SIMULINK和CARSIM之间的共模拟以验证控制性能后的路径。在这项研究中,Stanley控制器,常规滑动模式控制(SMC)和模型预测控制(MPC)用作评估提出的STA性能的基准控制器。在模拟中考虑了两种驾驶场景,包括正常驾驶和猛烈驾驶。全面评估控制绩效和控制工作(即转向的大小),新颖地提供了一个集成和加权性能评估指数。仿真结果表明,在正常驾驶情况下,所提出的STA的𝐼𝑊𝑃𝐸𝐼可以减少40.5%,25.8%,10.9%;与斯坦利控制器,常规SMC和MPC相比,在激烈的驾驶情况下,在激烈的驾驶情况下有62.5%,24%,6.8%。结果还表明,所提出的STA在颤动的衰减方面优于常规SMC,从而导致前方向盘角度输入更平滑,并且更平滑。与MPC相比,所提出的STA的优点在于其计算复杂性较低。此外,通过更改车辆质量和轮胎参数来验证控制器的鲁棒性。与基准方法相比,所提出的STA可以将𝐼𝑊𝑃𝐸𝐼的波动减少22.6%,22.3%和5.9%。这些结果表明,对系统扰动的考虑对于超级扭转滑动模式控制器的设计至关重要,这可以改善系统后自动驾驶汽车路径的鲁棒性。
强大的backstepping-super-twisting-sliding-mode-control- ...
主要关键词


相关文件推荐