机构名称:
¥ 1.0
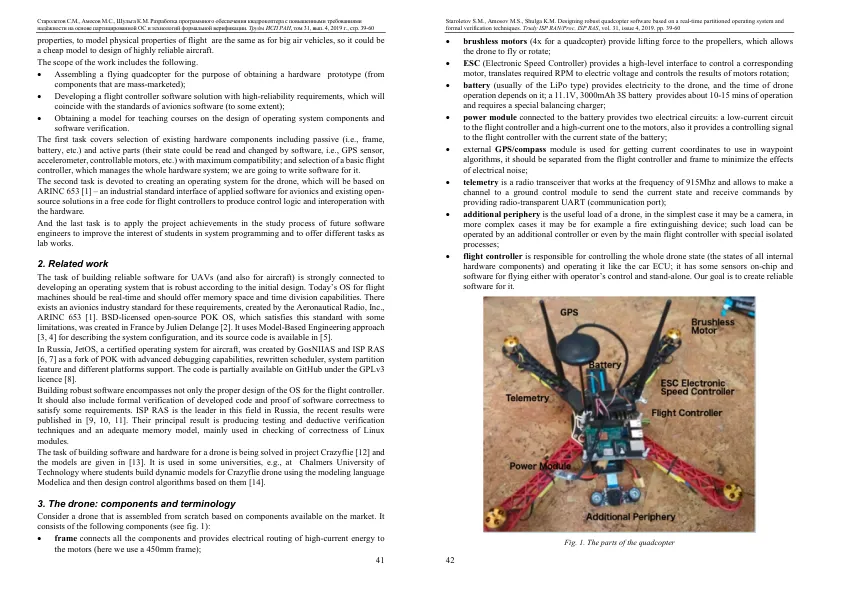
摘要。目前,制造可靠的无人机是科学技术领域的一项重要任务,因为此类设备在数字经济和现代生活中有很多用途,因此我们需要确保其可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。开源 POK(分区操作内核)就是这种操作系统的一个很好的例子。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式化验证方法。我们还使用演绎方法在代码级别提供可验证属性的示例,并使用差分动态逻辑在信息物理系统级别提供可验证属性的示例,以证明稳定性。
基于实时设计强大的四轴飞行器软件...
主要关键词


相关文件推荐