XiaoMi-AI文件搜索系统
World File Search System滑行道
欧洲空中导航安全组织 A-SMGCS 服务规范
4. 操作程序 ................................................................................................................ 48 4.1 介绍 ................................................................................................................ 48 4.2 管制员 ................................................................................................................ 48 4.2.1 监视服务 ................................................................................................ 48 4.2.2 机场安全支持服务 ...................................................................................... 48 4.2.2.1 概述 ...................................................................................................... 48 4.2.2.2 RMCA 信息警报程序 ............................................................................. 48 4.2.2.3 RMCA 警报警报程序 ............................................................................. 49 4.2.2.4 CATC 警报程序 ............................................................................................. 49 4.2.2.5 CMAC 信息警报程序 ............................................................................. 49 4.2.2.6 CMAC 警报警报程序 ............................................................................. 49 4.2.3 路线服务........................................................................................... 49 4.2.4 引导服务................................................................................................ 50 4.2.4.1 滑行道中线灯(TCL)的自动切换 ................................ 50 4.2.4.2 自动
“沟通代际,建立信任”
InfraRoad 拥有 40 多年的施工经验,是充满活力的卡塔尔市场的主要承包商。InfraRoad 是财政部 (MoF) 的 A 级认证公司,已完成多个重要项目,例如 Manateq 的 Ras Bufontas 经济区和 Ashghal 的移民立交项目,这些项目均在创纪录的时间内完成。目前,InfraRoad 正在为 Ashghal 和其他客户实施 Duhail 立交高速公路项目、哈马德国际机场西部滑行道以及各种道路和基础设施项目。InfraRoad 拥有丰富的经验、资源、技术和财务能力,能够按时、在预算内按照最高的质量和安全标准完成项目,这将为卡塔尔的主要客户和国际 EPC 承包商增加价值。

LFRZ - 圣纳泽尔蒙图尔 - dircam
一般规定 22.1 一般规定 22.1 避免飞越周围的工业场地。避免飞越周围的工业区。从 LFRZ 出发或飞往 LFRZ 的 IFR 飞行计划也应传送至 LFRSZPZX。往返于 LFRZ 的 IFR 飞行计划必须同时发送至 LFRSZPZX。跑道起飞程序 22.2 跑道起飞程序 22.2 跑道起飞程序 22.2 跑道和设备 22.2.1 跑道和设备 22.2.1 仅限 07 和 25 跑道起飞,经 TWY A 和 B。仅限 07 和 25 跑道起飞,经 TWY A 和 B。跑道起飞建立和结束标准 22.2.2 仅在 ATC 和 ACFT 移动时才执行跑道起飞程序。仅在空中交通管制 (ATC) 在场且飞机移动的情况下才实施 LVP。当 RVR <= 550 米时,同时进行一次移动。每次移动一次,RVR <= 550 米。当 RVR <= 550 米或云高 (DH) 小于 200 英尺时的 LVP 程序。当 RVR <= 550 米或云高 (DH) 低于 200 英尺时,LVP 阶段开始。当 RVR < 200 米时,不进行任何操作。当 RVR < 200 米时,暂停运行。运动区照明 22.2.3 运动区照明 22.2.3 跑道轴向照明、跑道边缘照明、跑道末端照明。轴向和边缘转向照明,TWY 边缘照明。跑道中线灯、跑道边缘灯、跑道末端灯。转弯区中心线及边灯、滑行道边灯。跑道前的等待点配备有照明面板和挥杆。跑道前的等候点配备有照明面板和警示灯。地面标志:轴向跑道、跑道和行驶跑道 / 转弯区的边缘、跑道前的等待点。地面标记:跑道轴线、跑道边缘、滑行道轴线和边缘/掉头区、跑道前的等待点
经验教训 - 美国农业部森林服务局
长距离着陆。AT-802 飞机不需要很长的着陆距离。许多飞行员试图通过长距离着陆来避免在跑道上长时间滑行。这会减少可用的跑道长度。在这种情况下,飞行员在距跑道进近端约 2150 英尺处着陆,这大约超出了跑道瞄准点标记 1000 英尺。可以想象,机长可能匆忙完成着陆程序,以便在中场按要求驶离滑行道。这种自我强加的紧迫感可能导致了方向控制的丧失——最有可能是因为急于着陆导致了漂移或飞行员引起的振荡。急于着陆会使人处于不利的心理状态,从而增加基于技能的错误的可能性。

2022 年冬季 - 国际空侧
权威,Ryder 表示。事实上,尽管 AMS 总部位于汉普郡法恩伯勒,制造工厂位于威尔特郡,但 AMS 通过分销代理网络在世界各地销售产品,他指出。AMS 的产品线包括起重气囊、气囊充气系统、机身起重系统、转盘和运输系统。所有设备的设计都是为了确保飞机能够快速安全地回收,满足波音和空客在必要时的要求。凭借其基于气囊的起重设备、除泥、牵引和雪橇设备、系留装置和运输机,AMS 提供了一系列全面的产品,可以在各种具有挑战性的位置和地形中回收受损和搁浅的飞机,Ryder 解释说。它甚至提供临时道路,可以在跑道或滑行道偏离的受损飞机之间铺设,以便

飞机滑行时间预测:特征重要性及其...
滑行仍然是许多机场的主要瓶颈。最近,已经提出了几种为滑行飞机分配有效路线的方法。这些方法所依赖的路线算法依赖于对穿越每一段滑行道所需时间的准确预测。许多特征都会影响滑行时间,包括所走的路线、飞机类别、机场的运营模式、交通拥堵信息和当地天气状况。使用几个国际机场的真实数据,我们比较了多个预测模型并调查了这些特征的影响,得出了准确建模滑行时间的最重要特征的结论。我们表明,使用一小部分特征可以实现高精度,这些特征包括所有机场普遍重要的特征(出发/到达、距离、总转弯、平均速度和最近的飞机数量)以及特定目标机场的少数特征。从所有特征转移到这个小子集会导致在 1、3 和 5 分钟内正确预测的动作下降不到 1 个百分点。
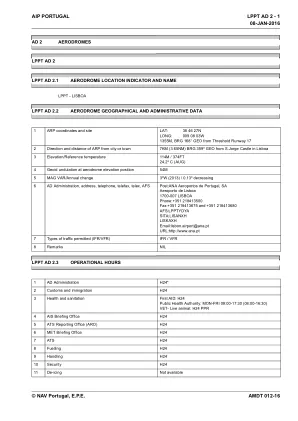
AIP 葡萄牙 LPPT AD 2
所有停机位均设有 ID 标志和标记;滑行道引导线。可应要求提供跟随引导。停机坪 10、11、12、14 和 60 设有 ASMGL - 飞机停机位机动引导灯,旨在用于 LVO 和 NVO 运行条件。当飞机位于距停机位引导线 60 米处时,上述停机位的进站航班将看到黄色序列和路面上的全向闪光灯亮起,此时 ASMGL 灯将从距停机位入口 45 米处开始变为黄色,直到 APIS 上发出启动输入。所有未安装飞机停放和信息系统 (APIS) 的停机位均可编组。 APIS 适用于位于 10、11、12、14、20、22、30、40、41、42、50 和 80 号停机坪的所有停机位。APIS 显示“OK”是系统状态信息,而不是停机位许可确认信息。当 APIS 显示“OK”信息时,飞行员不应认为飞机安全区 (ASA) 内没有障碍物。所有 APIS 单元的描述

LFRV - 瓦讷默孔 - DIRCAM
(1) 初始爬升梯度为 7.5%,最高可达 600 英尺 AMSL,由位于 474 英尺高度的一棵树决定,该树位于距离 DER 169 米、位于跑道中心线以北 177 米处,然后适用 3.3% 的规定梯度。 RWY 22:爬升 MAG 220° 至 900(463),然后直接航线上升至航路安全高度。 RWY 22:爬升 RM 220° 至 900(463),然后直接爬升至航路安全高度。进场飞机 22.2 到达航班 22.2 PAPI 运行,任何夜间进近 RWY 22 都必须运行。禁止盘旋 RWY 08 和 26。禁止 MVL 跑道 08 和 26。LVP 程序 22.3 LVP 程序 22.3 可用的设施和设备 22.3.1 可用的设施和设备 22.3.1 RWY 22.3.1.1 跑道 22.3.1.1 RWY 04 和 22 仅适用于非精密进近。 04 和 22 号跑道仅获准用于常规进近。滑行道 22.3.1.2 滑行道 22.3.1.2 机动区内只允许一个 ACFT 滑行。机动区内只允许有一个滑行装置。通讯 22.3.1.3 通讯 22.3.1.3 当 LVP 程序正在进行时,AFIS 会通知飞行员。当 LVP 程序正在进行时,AFIS 会通知飞行员。低空飞行阶段实施及结束标准 22.3.2 低空飞行阶段实施及结束标准 22.3.2 当跑道视程 (RVR) 处于 250 米至 550 米之间时,离场时的低空飞行阶段开始。抵达时无 LVP。当 RVR 处于 250 米至 550 米之间时,起跑线 LVP 阶段开始。抵达时无 LVP。 RWY 照明 22.3.3 跑道照明 22.3.3 边缘照明,LIL THR 04 和 22。其他照明:等待点 A 和 B 的 RWY 保护灯(摆动灯)。LIL 边缘照明 TWY A。侧灯,BI 中的阈值 04 和 22。其他照明:等待点 A 和 B 的跑道保护灯(摆动灯)。BI 的 TWY A 侧向照明。备注 22.3.4 观察 22.3.4 辅助电源装置:当主网络发生故障时,并且在发电机继电之前,逆变器可确保电力供应的连续性。

从多静态雷达原理中得出的 ASDE 雷达性能的潜在增强 - 数字航空电子系统,2001 年。DASC。第 20 届会议
机场地面探测设备 (ASDE) 雷达易受多径传播和散射效应的影响,这可能导致在机场表面的关键位置(如跑道和滑行道 [l])放置假目标。此类假目标很容易损害这些雷达的性能,并导致控制器做出非常不理想的反应,包括当此类多径假目标位于跑道上时不必要地中止着陆和起飞操作。这些情况会影响操作效率,也会降低用户对 ASDE 雷达和相关系统的信心,从而对安全产生不利影响。对该问题的评估导致考虑通过将当前的单基地雷达转变为多基地配置 (ASDE-MP) 来增强 ASDE 雷达性能。多基地雷达提供对目标的多重检测以及对导致假目标检测的多径散射现象的显着差异响应。后者特性通过结合位于不同位置的多个雷达接收器的信息来减少对假目标的检测,从而对机场表面的共同关注区域进行监视。

新 PR “C” 学校重点关注机组人员安全 MQ-25 ...
的位置大致相同,并且大致相似,着陆滑行灯开关上有两个小“圆顶”,以帮助通过手感将其与发射杆开关区分开来。此外,发射杆开关需要飞行员先将其从止动装置中拉出,然后再将其移至上或下位置。在我尝试关闭着陆/滑行灯时,我无意中抓住了发射杆开关并将其置于“向下”位置。当开关置于“向下”位置时,正常 NWS 会立即解除,只能通过按下操纵杆上的 NWS 按钮才能重新启用。通常,再次按住 NWS 按钮将提供高增益 NWS,但在发射杆向下的情况下,飞行员只能选择最高的低增益 NWS。由于发射杆现在已向下,即使按住高增益 NWS 按钮,我也只能选择低增益 NWS。这就是我得出的结论:我没有通过高增益 NWS 产生所需的转弯速率,这表明当我开始转向主滑行道时可能存在问题。