XiaoMi-AI文件搜索系统
World File Search System滑行

LFBP - 波城比利牛斯 - dircam
向 N1 滑行的方式如下: - 从 Alpha 商业停机坪出发,走 TWY N(C 和 M 之间)、M 和 NE。- 来自高尔夫围裙,使用 TWY G、NG、C、N(C 和 M 之间)、M 和 NE。LVP 中代码 E 或 AN124 交通的特殊性:如果一台 ACFT 位于停机坪上,则无法在 C 和 M 之间的滑行道 N 上滑行 P2 LVP 中代码 E 或 AN124 交通的特殊性:在 TWY 上滑行如果飞机处于 P2,则不可能在 C 和 M 之间进行 N。如果有多个 ACFT 出发,当 ACFT n°1 宣布已到达等待点 N1 时,ACFT n°2 将能够离开停机坪。如果有多架飞机起飞,当 1 号飞机宣布已到达等待点 N1 时,2 号飞机可以离开停机坪。飞行员的注意力,特别是在 LVP 期间,集中在服务道路交叉口和绕过停机坪 A 上。 飞行员的注意力,特别是在 LVP 期间,集中在穿过和绕过停机坪 A 的服务道路上 其他 20.4.3 其他 20.4.3鸟控通道位于 RWY 轴以南 75 m 处,仅用于 VMC。鸟类控制路径位于 VMC 条件下使用的跑道轴线以南 75 m 处。发动机功率检查点/超出滑行推力的发动机测试仅在 RWY 0500 至 2100 之间进行。滑行功率之外的固定点/发动机测试仅在 0500 至 2100 之间的赛道上进行。围裙 A 和 G:最小推力。围裙 A 和 G:最小推力。停车 P7:ACFT 代码 E 和 F,以最小功率小心滑行。停车 P7:ACFT 代码 E 和 F,谨慎驾驶最小功率。ACFT 代码 E 和 F:在 N3 和 C 或 N3 和 NG 上原路滑行。飞机代码 E 和 F:上去乘坐 N3 和 C 或 N3 和 NG。掉头区域阈值 13:遵循跑道掉头垫标记;前起落架转向角 > 45°。掉头区域阈值 13:遵循掉头区域上的地面标记;前轮转动角度 > 45°。出租车速度很慢。减速行驶。
低能见度条件下的自动化支持:虚拟停止...
简介和背景 虚拟区块控制 (VBC) 概念描述了低能见度条件下机场地面控制程序,必须将其视为普通区块控制(也称为程序控制)的增强。当应用程序控制时,机场塔台的 ATC 会将飞机放行到机场活动区内可视位置,例如中间等待位置 (IHP)。一系列可视位置形成所谓的控制区块,其中每次只有一架飞机滑行,以防止碰撞并提高低能见度下的运行安全性。飞行员在到达控制区块的净空限制时报告飞机位置。虽然这种操作可以被认为是安全的,但它会降低活动区的机场容量以及滑行吞吐量 [10]。
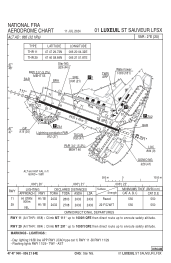
01 luxeuil st sauveur lfsx
多方向起飞 1500 英尺 QFE MAX,但 QFU 的 ARR 扇区(ER 和 IP 之间)除外,使用 1000 英尺 QFE MAX。滑行时报告 HGT 和出口点。空中时,DEP 在 2500 英尺 QFE 或以下,预计在 CH TWR CH 14 上接触;在 2500 英尺 QFE 以上,预计在 CH 15 上接触 特殊说明:当 AD 为绿色状态“OAT Victor Special”时:在 1000 英尺 QFE 或云层以下可能出现 OAT Victor Special 下的 DEP。滑行时报告 HGT 和出口点。通过 ARR 扇区的 DEP 在 TKOF 之前提交给 APP。
基于多目标模糊规则的飞机滑行时间预测和不确定性量化
摘要 — 不断增长的空中交通需求和高度互联的空中交通网络给该行业带来了巨大压力,要求其优化空中交通管理 (ATM) 相关性能并开发强大的 ATM 系统。最近在准确预测飞机滑行时间方面所做的努力已在生成更高效的滑行路线和时刻表方面取得了重大进展,从而使其他关键的空侧操作受益,例如跑道排序和登机口分配。然而,很少有研究致力于量化与滑行飞机相关的不确定性。基于确定性和准确的飞机滑行时间预测生成的路线和时刻表可能无法在由于天气条件、操作场景和飞行员行为等因素而产生的不确定性下恢复,从而损害整个系统的性能,因为滑行延误可能会在整个网络中传播。因此,本文的主要目的是利用多目标模糊规则系统根据历史飞机滑行数据更好地量化这种不确定性。初步结果表明,所提出的方法可以以更具信息量的方式捕捉不确定性,因此代表了一种有前途的工具,可以进一步制定稳健的滑行计划,以减少由于滑行时间不确定而造成的延误。

下降性能测试 - 免费
上个月我们完成了如何减少锯齿状爬升数据和确定最陡角度爬升速度 V x 以及相关爬升角度和爬升梯度的说明。本月我们将解决下降性能问题,如果您认为下降只不过是反向爬升,那么您基本上是对的。如何让飞机获得最佳下降性能可能是您在巡航前往目的地时讨论的问题。与副驾驶或乘客开玩笑是一种很好的方法——砰!发动机熄火了。现在怎么办?有一件事是肯定的。现在不是思考飞机最佳滑行速度的好时机。更好的时间是您的下一次飞行,确定飞机的滑行性能比我们在过去几个月中详细介绍的爬升性能测试更容易。飞机的爬升率取决于功率的大小

从滑行道起飞 - 阿姆斯特丹史基浦机场 10 ...
调查原因 2010 年 2 月 10 日,一架荷兰皇家航空公司的波音 737 客机从阿姆斯特丹史基浦机场的滑行道而非跑道上起飞。荷兰安全委员会对这一严重事件进行了调查,因为飞机在滑行道上起飞或降落时,速度过快,安全风险很高;滑行道上可能还有其他物体,例如其他飞机或车辆,这是其他用户意想不到的。如果起飞或降落的飞机与其中一个物体相撞,后果可能非常严重。因此,荷兰安全委员会进行了调查,以确定这种情况是如何发生的,以及应采取哪些措施,以防止将来再次发生类似事件。

Stingray AUV:小型且经济高效的生态监测解决方案
摘要 — 水下航行器最近在生态监测中变得越来越有用,这在很大程度上要归功于现代计算机提供的先进处理能力。大多数水下航行器都是鱼雷形的,并且是非完整控制的,这使它们效率高,但缺乏精确的机动性。当需要更精确的导航时,会使用一些立方体形状的航行器;但是,由于航行器具有很大的阻力,它们无法利用滑行运动和流体动力升力。Stingray 自主水下航行器 (AUV) 是一款紧凑、轻便的 AUV,具有独特的设计实现。Stingray 的船体是一个碳纤维外壳,具有仿生设计,让人想起了它居住在海洋中的名字。这种流线型轮廓提供非常低的阻力,使航行器能够在水中滑行。Stingray 还使用独特的推进系统,将机翼和尾部上的三个垂直推进器与安装在下方的两个 Voith-Schneider 螺旋桨相结合,用于滚动和俯仰,用于偏航和喘振。此外,这两个螺旋桨还提供了扫射能力,使飞行器能够以六个自由度移动。这使 Stingray 能够轻松地以低速进行机动并以类似直升机的方式悬停,同时还能利用机翼产生的升力像固定翼飞机一样滑行。
AFI 13-213 JB 查尔斯顿补充 - 空军
4.5.1.2. (新增)跑道等待位置标志(附件 3,图 A3.1)。跑道等待位置标志位于与跑道相交的滑行道上,与跑道等待位置标记相对应,如附件 3,图 A3.2 所示。标志上的跑道编号排列与相应的跑道入口相对应。例如,“33-15”表示 33 号跑道入口在左侧,15 号跑道入口在右侧。在与起飞跑道起点相交的滑行道上,标志上只能显示起飞跑道的标识。例如,“33”表示 33 号跑道的起点。未经空中交通管制部门批准,车辆操作员或行人不得越过这些标志。车辆和/或行人将在标志前停下,并与空中交通管制部门联系,请求允许越过等待标志进入跑道。