XiaoMi-AI文件搜索系统
World File Search System激光雷达

朝着物理意识到的深度学习体系结构用于激光雷达强度模拟
摘要:自动驾驶汽车(AVS)在很大程度上依靠LiDAR感知来了解环境的理解和导航。LIDAR强度提供了有关反射激光信号的有价值信息,并在增强AV的感知能力方面起着至关重要的作用。但是,由于环境中物体的材料特性不可用,并且激光束与环境之间的复杂相互作用,因此准确模拟激光雷达强度仍然是一个挑战。所提出的方法旨在通过将基于物理的模态纳入深度学习框架中来提高强度模拟的准确性。捕获激光束与物体之间相互作用的关键实体之一是入射角。在这项工作中,我们证明,将激光雷达的入射角作为单独的输入方式添加到深神经网络中可以显着增强结果。我们将这种新颖的输入方式整合到了两个突出的深度学习体系结构中:U-NET,一个卷积神经网络(CNN)和PIX2PIX,一种生成的对抗性网络(GAN)。我们研究了这两个体系结构的强度预测任务,并使用了Semantickitti和VoxelScape数据集进行实验。综合分析表明,这两种体系结构都从发射角中受益,作为附加输入。此外,Pix2Pix体系结构的表现优于U-NET,尤其是在合并入射角时。

将扩散模型缩放到现实世界3D激光雷达场景完成
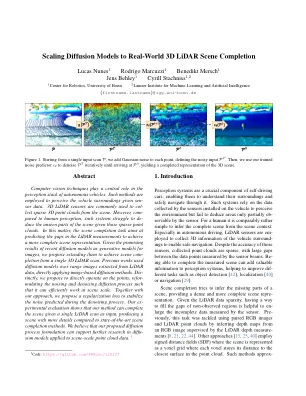
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
将扩散模型缩放到现实世界3D激光雷达场景完成
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
Sandia-HPC-报告-2024.pdf
桑迪亚国家实验室模拟的一个独特进展是实施“合成仪器”。实际仪器数据收集的采样模式用于保存速度数据,而不是沿平面或线查看模拟数据,从而可以对模拟数据和仪器数据进行一对一的比较。例如,激光雷达使用来自空气中粒子散射的激光的视线多普勒数据。激光的指向具有特定的模式,可以绘制出指定区域的速度。合成激光雷达使用与现场激光雷达相同的位置和时间模式记录模拟中的速度。该团队正在将这种方法用于激光雷达、双 X 波段雷达、系留气球和气象站。图 4 显示了数据平面与合成激光雷达和雷达图像的比较。
3D激光雷达扫描到地图长期定位的可推广稳定点细分
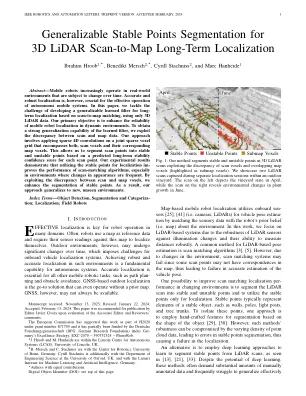
摘要 - 动物机器人越来越多地在实际会随着时间而变化的现实环境中运行。准确且健壮的本地化对于自动移动系统的有效运行至关重要。在本文中,我们仅使用3D LIDAR数据来应对基于扫描到地图匹配的长期本地化开发可推广的学习过滤器的挑战。我们的主要目标是提高动态环境中移动机器人本地化的可靠性。为了获得学习过滤器的强大概括能力,我们利用扫描和MAP数据之间的差异。我们的方法涉及将稀疏的4D卷积应用于包含扫描素及其相应地图体素的关节稀疏体素电网上。这使我们可以根据每个扫描点的长期稳定置信分数将扫描点分为稳定且不稳定的点。我们的实验结果表明,利用稳定点进行定位 - 证明了扫描匹配算法的性能,尤其是在外观变化频繁的环境中。通过利用扫描和地图体素之间的差异,我们增强了稳定点的分割。因此,我们的方法概括为新的,看不见的环境。
量身定制的材料,用于汽车雷达,雷达,近红外和天线应用
makrolon®在任何激光雷达系统的工作范围内显示出高度稳定的折射率。对于驱动器监控系统,操作的波长范围可能高于900 nm,或者对于基于激光的长距离激光雷达系统的905 nm或1550 nm。作为

光学产品 | 大气情报密歇根航空航天
• 用于发射和测试范围的地面激光雷达 • 机载光学大气数据系统,可选配晴空湍流、冰和火山灰检测 • 机载精密空投激光雷达,可实现更准确、更一致的有效载荷投放 • 用于改进天气和气候模型的空间大气剖面测量 • 用于风力涡轮机和风电场优化和保护的激光雷达
开发和测试用于风场测绘的 Er:Yb:GLASS 相干激光雷达
1 简介 1 1.1 相干激光雷达。。。。。。。。。。。。。。。。。。。。。。。....5 1.1.1 大气散射 ....................6 1.1.2 反向散射功率 .....................7 1.2 审查当前的 CLR ..................。。。。。8 1.2.1 眼睛安全。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 1.2.2 10 μm 系统。。。。。。。。。。。。。。。。。。。。。。。。。。。8 1.2.3 1 μm 系统。。。。。。。。。。。。。。。。。。。。。。。。。。。12 1.2.4 2μm系统。。。。。。。。。。。。。。。。。。。。。。。。。。。13 1.2.5 人眼安全波长带系统 .。。。。。。。。。。。。。。。17 1.2.6 其他波长.。。。。。。。。。。。。。。。。。。。。。。。21 1.2.7 结论.。。。。。。。。。。。。。。。。。。。。。。。。。。。。21 1.3 项目目标 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 1.4 论文概述.。。。。。。。。。。。。。。。。。。。。。。。。。。。。。24

海报:自适应高频去除攻击,以绕过新产品激光雷达中的脉冲指纹
摘要 - Lidar是自动驾驶汽车领域(AVS)领域的关键传感器。怨恨的研究积极研究了针对LiDAR SPOFOFG攻击的各种安全意义。为了防止这些攻击,预计Pulse -Fifferpinting是最有前途的对策之一,最近的研究表明了其高防御能力,尤其是防止物体清除攻击。在此海报中,我们报告了针对激光雷达攻击的脉冲固定识别进一步的安全性分析的进展。我们设计了一种新颖的自适应攻击策略,即自适应高频去除(A-HFR)攻击,这比现有的HFR攻击可以有效地抵抗更广泛的激光痛。我们评估了对商用激光雷达的A-HFR攻击,并发现A-HFR攻击可以成功地在20°水平和16°垂直角度内成功删除点云的96%以上。我们的发现表明当前的脉冲固定技术可能不会有足够的稳定性来阻止SPOOFEFFIFG攻击。我们最终讨论了我们的未来计划。

hgcdte apds检测器的开发在CEA/LETI的大气激光雷达和空间光学通信
HGCDTE APD检测器模块电信是在CEA/LETI上开发的,用于大气刺激和自由空间光学(FSO)。开发是由可以在每个检测器模块中调整的通用子组件的设计和制造驱动的,以满足每个应用程序的特定检测器要求。从目前为大气激光雷达开发的探测器模块所设定的挑战详细介绍了此类子组件的优化,该挑战在AIRBUS的R&T CNES项目的范围内以及H2020 Project holdon的R&T项目范围以及FSO,以及在ESA项目的范围内与Mynaric Laserc的lasercom lasercom gmbhhs of airbus和FSO。最近已将两个检测器模块传递到空中客车DS进行广泛的LIDAR仿真测试。表明,与先前开发的大面积检测器相比,输入噪声,NEP = 10-15fw/√Hz(5个光子RMS)已减少了三分,尽管带宽已增加到180 MHz,以响应高空间深度分辨率的要求。在发现短光脉冲后200 ns时,时间延迟为10 -4,这与诸如测深分析之类的激光雷达应用兼容。