机构名称:
¥ 1.0
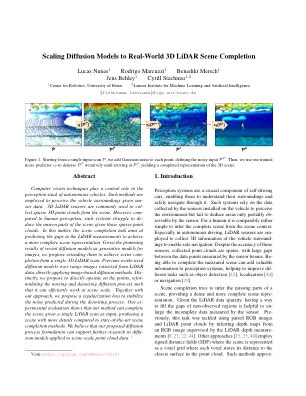
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
将扩散模型缩放到现实世界3D激光雷达场景完成
主要关键词




相关文件推荐