机构名称:
¥ 1.0
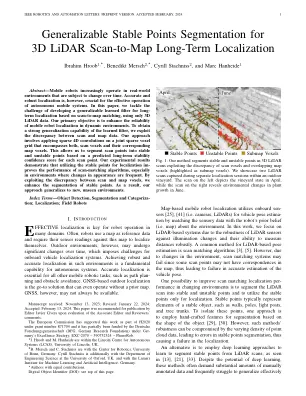
摘要 - 动物机器人越来越多地在实际会随着时间而变化的现实环境中运行。准确且健壮的本地化对于自动移动系统的有效运行至关重要。在本文中,我们仅使用3D LIDAR数据来应对基于扫描到地图匹配的长期本地化开发可推广的学习过滤器的挑战。我们的主要目标是提高动态环境中移动机器人本地化的可靠性。为了获得学习过滤器的强大概括能力,我们利用扫描和MAP数据之间的差异。我们的方法涉及将稀疏的4D卷积应用于包含扫描素及其相应地图体素的关节稀疏体素电网上。这使我们可以根据每个扫描点的长期稳定置信分数将扫描点分为稳定且不稳定的点。我们的实验结果表明,利用稳定点进行定位 - 证明了扫描匹配算法的性能,尤其是在外观变化频繁的环境中。通过利用扫描和地图体素之间的差异,我们增强了稳定点的分割。因此,我们的方法概括为新的,看不见的环境。
3D激光雷达扫描到地图长期定位的可推广稳定点细分
主要关键词





相关文件推荐