XiaoMi-AI文件搜索系统
World File Search System灭火的

自动灭火的设计和原型制作...
摘要此摘要提出了基于Arduino的自动消防车辆(AFFV)的概念化和开发。车辆配备了一套传感器,包括火焰,超声波,PIR和温度/湿度传感器,以自主检测并响应火灾。这些传感器的集成使车辆能够在障碍物,监测环境条件上导航,并确保在紧急情况下人类存在的安全。Arduino Uno Rev3用作中央控制单元,根据传感器的输入来策划车辆的动作。发生火灾,火焰传感器会触发车辆进入消防模式。超声波传感器确保避免障碍物,使车辆能够在复杂的环境中导航。PIR传感器检测到人类的存在,确保响应者和公众的安全。此外,温度和湿度传感器不断监视环境条件,根据实时数据优化消防策略。车辆通过处理传感器输入并决定动作的决策算法操作,使其能够有效抑制火焰,避免障碍并随着时间的推移适应其行为。机器学习算法的实施有助于车辆的适应能力,从而通过每个消防任务提高其性能。这款基于Arduino的AFF还探索了可选功能,例如通过IoT Technologies进行远程监视。关键字:Arduino Uno,Nodemcu,自主,消防它使操作员能够远程控制车辆,接收实时传感器数据并在消防操作期间做出明智的决定。这种自动消防车辆的优势在于其迅速对火灾事件的反应,通过障碍物安全导航以及实时环境监测。拟议的AFFV在包括居民区,工业综合体和公共场所在内的各种环境中找到了应用程序,可以在其中增强紧急响应能力,增强安全性并优化消防策略。
用于灭火的水雾技术 Ln= 的回顾
众多实验项目。这些应用包括 B 类喷雾和池火、飞机舱、船上机械和发动机舱、船上住宿空间以及计算机和电子应用。总结这些实验努力,特定水雾系统的有效性在很大程度上取决于不仅能够产生足够小的液滴尺寸,而且还能够在整个舱室中分布足够的雾浓度。灭火所需的广泛接受的临界水滴浓度尚未确定。影响水雾系统在特定应用中成功或失败的因素包括液滴大小、速度、喷雾模式几何形状以及喷雾喷射的动量和混合特性,以及受保护区域的几何形状和其他特性。目前,这些因素对系统有效性的影响尚不清楚。除非通过研究在雾分布和火焰相互作用的理解方面取得突破,否则在合理的未来,有必要在特定系统的背景下对水雾进行独特应用的评估。
关于您的饮酒的重要信息...
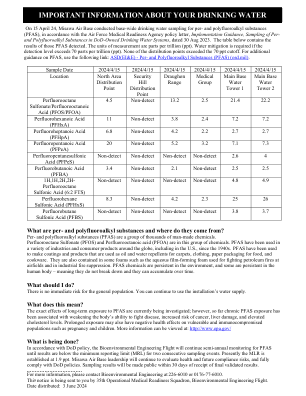
什么是全氟和多氟烷基物质?它们来自哪里?全氟和多氟烷基物质 (PFAS) 是一类由数千种人造化学物质组成的物质。全氟辛烷磺酸 (PFOS) 和全氟辛酸 (PFOA) 都属于这一类化学物质。自 1940 年代以来,PFAS 已被用于全球(包括美国)的各种行业和消费品中。PFAS 被用于制造涂料和用作地毯、衣物、食品纸包装和炊具的防油防水剂的产品。它们也含有在某些泡沫中,例如用于扑灭机场石油火灾和工业灭火的水成膜泡沫。PFAS 化学物质在环境中具有持久性,有些在人体内也具有持久性 - 这意味着它们不会分解并且会随着时间的推移而积累。

Microsoft Word - 标签 1 - PFAS 饮用水通知 2024 年 5 月_更新
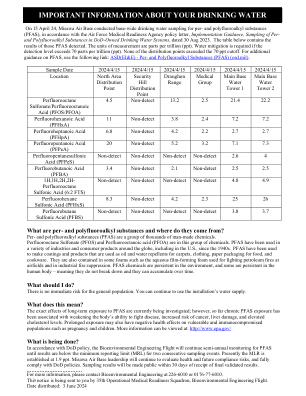
什么是全氟和多氟烷基物质?它们来自哪里?全氟和多氟烷基物质 (PFAS) 是一类由数千种人造化学物质组成的物质。全氟辛烷磺酸 (PFOS) 和全氟辛酸 (PFOA) 都属于这一类化学物质。自 1940 年代以来,PFAS 已被用于全球(包括美国)的各种行业和消费品中。PFAS 被用于制造涂料和用作地毯、衣物、食品纸包装和炊具的防油防水剂的产品。它们也含有在某些泡沫中,例如用于扑灭机场石油火灾和工业灭火的水成膜泡沫。PFAS 化学物质在环境中具有持久性,有些在人体内也具有持久性 - 这意味着它们不会分解并且会随着时间的推移而积累。
紧急救援人员(临时工)的薪酬计划
3. 为正在发生的事故提供支持,包括事故后管理(例如,调度、仓库/缓存工作人员、付款团队成员、行政支持和审查)。事故后管理通常不应超过 90 个日历日。 4. 预先部署或将资源置于待命状态以备可能的调度。 5. 临时替换目前正在灭火的消防队员或消防管理人员。 6. 允许人员参加紧急事故培训,为紧急事故响应做准备,包括全灾害培训。在大多数情况下,无论雇用机构如何,每年总计不应超过 80 小时。此权限不能用于规避其他雇用权限,例如临时 1039 任命或职业季节性任命。80 小时限制包括必修的年度进修课程。80 小时限制不包括旅行时间。

我们的人才战略 2024-2028
我们的员工队伍由 8,500 多名才华横溢、富有同情心的员工组成,他们每天都在努力为社区做出贡献。他们包括灭火的一线警员、学校教师、支持有特殊教育需求的儿童和年轻人、保护居民免受诈骗、修建新桥梁和道路以及维护我们现有的 3000 英里长的道路网络。要做出贡献,还需要规划人员、律师、生态学家、支持官员和志愿者在幕后工作,以确保纳税人的钱得到合理使用,并通过民主程序做出最公平的决定。整个委员会的服务和角色种类繁多,这要求我们采用联合的“一个委员会”方法来招聘、奖励、留住和聘用我们的员工,以便在合适的时间让合适的人在合适的岗位上工作。包容性是我们的 DNA,我们赞赏差异并为每个人提供机会。
空中灭火国际最佳实践
调查结果和建议摘要 2006 年 8 月和 9 月,一小群澳大利亚消防机构人员访问了法国、加拿大和美国,研究空中扑灭景观火灾的各个方面。此次访问的主要目的是寻找机会提高澳大利亚空中灭火的运营安全性、效率和有效性。该小组得出结论,目前在澳大利亚实施的大多数做法都是相关且适当的,并且通常反映了国际最佳实践。但是,也发现了一些潜在的改进和改进。还得出结论,继续分享信息并加强与国际同事的联系是有利的。下面概述的主要调查结果和建议来自对访问过程中出现的重要主题进行优先排序和综合。这些构成了访问的“要点”。本报告正文包含与每个单独主题相关的更详细的调查结果和建议,以及主要调查结果和建议背后的理由。主要调查结果
帕拉汀醇® 10-p
灭火介质 合适的灭火介质:干粉、水雾、二氧化碳、泡沫 出于安全原因不合适的灭火介质:水喷射 附加信息:采用适合周围环境的灭火措施。 物质或混合物引起的特殊危险 不要吸入气体/蒸气。 该产品易燃。燃烧会产生有害和有毒烟雾。 在安全条件下关闭或停止释放的物质/产品。 用水喷雾冷却危险的容器。 由于制剂中含有有机化合物,燃烧会产生浓密的黑烟。吸入危险的分解产物可能会对健康造成严重损害。 不要将化学污染的水排入下水道、土壤或地表水中。必须采取足够的措施来保留用于灭火的水。 根据当地法规处理受污染的水和土壤。 对消防员的建议 特殊防护设备:佩戴自给式呼吸器。 更多信息:撤离该区域所有不必要的人员。从最大距离灭火。将灭火措施扩展到周围环境。按照官方规定处理火灾残余物和受污染的灭火水。

li-g4范围
LI-G4被归类为9类危险货物,UN3480是一个密封的金属柜中具有高能密度和危险材料的电源。安装必须遵守国家安全法规,根据最终用途申请的外壳,安装,蠕变,清除,标记和隔离要求。我们建议安装由授权专业人员执行。关闭系统并在更改任何连接之前检查危险电压!锂电源必须仅由训练有素的人员服务。LI-G4的最低入口保护等级为IP54。确保安装锂电源符合IP54要求。观察以下内容:不要打开LI-G4。在充满电之前,请勿排放新的LI-G4。仅在指定限制内收取费用。确保LI-G4在移动和安装过程中关闭。请勿将Li-G4倒置或侧面安装。检查LI-G4在运输过程中是否已损坏。不要让外面暴露于元素。不要在2,000米以上(6,562英尺)以上的高度使用,不允许儿童或动物与设备或连接的电源接触。发生火灾的危险:灰尘颗粒爆炸的危险。由于火灾或热量发育引起的分解会发出有毒和腐蚀性气体。强烈刺激眼睛和呼吸器官的燃烧气体。在警告他人的道路上放置一个警告标志。一般预防措施驾驶员应观察到这些危害是否发生:关闭电动机。将危险告知其他人,并建议他们远离风向。立即联系警察和消防队,并通知他们船上有锂电池(UN3480)。灭火的指示:用水扑灭火。如果可能的话,将Li-G4完全浸入水中。用水灭绝会产生氟化物,磷酸盐,氟化物氧化物和一氧化碳。或者,用二氧化碳灭火器灭火。