XiaoMi-AI文件搜索系统
World File Search System物体

FM5812 (文件编号
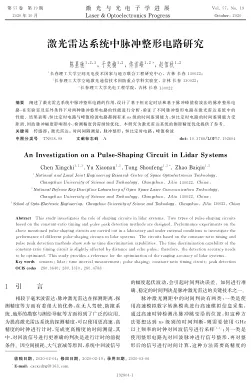
FM5812 芯片的结构框架见图 1 ,首先芯片内部锁相环产生一个 5.8G 的射频微波信号,经过驱动级放 大由发射天线发出,当射频微波信号遇到移动的物体,发射信号和反射信号会产生多普勒雷达效应,即它 们之间有一定的频率差。这时反射信号通过接收天线,经过低噪声放大器放大和发射信号在混频器内进行 混频,混频器经过处理得到一个中频信号,再经过低通滤波器过滤掉噪声,同时将中频信号进行放大。最 后通过内部集成 MCU 进行数字处理输出高低电平,进而判断感应器周围是否存在移动的物体。

接近实时的物体检测,用于时间紧迫的任务规划
地理空间信息通过提供早期预警信号和提供运营见解,已经证明了其至关重要性。在本文中,我们将介绍另一个应用领域,即收集地理空间信息以用于综合培训和模拟解决方案。政府(即情报界)和商业地理空间数据提供商(例如 Maxar Technologies)为所选的感兴趣区域提供了大量接近实时的数据。例如,如果需要,Maxar 的卫星群每天可以提供多个重访周期。生成的大量地理空间数据是现代大数据分析的典型应用领域,由先进的机器学习模型支持。考虑到这些技术进步,我们将提供一个端到端地理空间平台来消化和分析捕获的数据(例如,通过无人机或卫星)并输出 3D 环境,从而为关键任务规划和培训提供下一代建模和仿真 (M&S) 解决方案。

检测和定位与移动设备集成的无人机系统 (UAS) 上的物体
I. 引言 无人机系统 (UAS) 领域已扩展到包括民用和军用在内的所有领域,并出现了许多创新用例。这些 UAS 在军事领域的应用正在取得显著进步。执行情报、监视和侦察 (ISR) 任务以及守卫职责等军事任务需要直接且耗时的人力。士兵花费大量时间进行巡逻、驻守检查站和守卫塔以实现这些任务的目标。然而,随着自主技术的进步,UAS 现在在减少人类执行这些劳动密集型任务的需求以及降低直接暴露于危险情况的风险方面发挥着重要作用。四旋翼飞行器具有垂直起降能力以及相对较高的有效载荷,为此类任务提供了绝佳平台。现在有机会整合现有能力并进一步利用潜在的 UAS。四旋翼解决方案的应用还支持国防部 (DoD) 在《2011-2036 财年无人系统集成路线图》[1] 中概述的无人系统目标。要执行 ISR 任务,UAS 需要检测威胁。传感和感知算法的最新进展使得使用基于视觉的传感器适合这项任务。UAS 需要在共享参考框架中定位威胁,并将此信息提供给士兵,以便
关于物体检测、面部跟踪、数字测绘... 的调查
摘要 – 遥控航空系统 (RPAS) 用于遥感,是获取地理数据的重要方式,具有实时性、适应性、高分辨率、成本效益等优点,并且可以在危险环境中获取数据而不会危及机组人员。它具有巨大的潜力和光明的未来,因为 RPAS 遥感是机载和星载遥感的强大伴侣。这项工作全面介绍了具有机器学习功能的遥控航空系统 (RPAS) 领域的最新进展。重点是一些特定领域:面部跟踪、物体检测、监视。本文介绍了用于这些应用的方法和算法,讨论了它们的性能和准确性,并强调了在实施此类系统时面临的挑战。本文还概述了用于开发这些系统的各种平台和工具,包括硬件和软件组件。最后,回顾了该领域未来的研究和发展方向。索引词 – 遥控航空系统;遥感应用;物体检测;面部跟踪;

TAC-MAN:触觉通知的铰接物体的无效操纵
这项工作得到了国家科学技术重大项目(2022ZD0114900)的部分支持Horizon Europe框架通过可触及的项目(101092518)。(Zihang Zhao和Yuyang li对这项工作也同样贡献。相应的作者:Lecheng Ruan和Yixin Zhu。)Zihang Zhao和Yixin Zhu曾与中国北京大学100871北京大学的人工智能研究所一起(电子邮件:zhaozihang@stu@stu.pku.edu.edu.cn; yixin.zhu@pku.edu.edu.cn)。Yuyang Li和Zhenghao Qi曾在中国北京大学,北京大学,北京大学和北京通用人工智能研究所,中国北京100080,中国以及自动化部,北京大学,北京大学,北京大学,北京大学,北京大学,北京100084,中国(电子邮件): {liyuyang20,qi-zh21}@mails.tsinghua.edu.cn)。Wanlin Li与中国北京100080的北京通用人工智能研究所合作(电子邮件:liwanlin@bigai.ai)。Lecheng Ruan曾在中国北京100871的北京大学工程学院以及中国武汉430075的PKU-Wuhan人工智能研究所(Ruanlecheng@ucucla.edu)任职。Zihang Zhao和Lecheng Ruan在这项工作中也部分地在北京通用人工智能研究所中。数字对象标识符(DOI):请参阅此页面的顶部。Kaspar Althoefer曾在英国伦敦皇后大学伦敦皇后大学工程与材料科学学院内的高级机器人中心 @皇后玛丽(Queen Mary),伦敦E1 4NS(电子邮件:k.althoefer@qmul.ac.uk)。

从等温源到有限厚度物体的热扩散阻力
在从热表面到物体的二维热传导过程中,会遇到热扩散阻力。热扩散和热收缩阻力的相反问题在用于微电子和其他发热设备的热管理的散热器和热扩散器的设计中具有很大的技术相关性。过去在热扩散理论分析方面的大部分工作都是基于具有给定热通量的源。相比之下,等温源问题由于边界条件的混合性质而存在困难,因此只能获得近似解。这项工作推导出从等温源到有限厚度板或圆柱体的稳态热扩散阻力。混合边界条件的处理方式是将其置于空间变化的对流边界条件的形式中,源上的 Biot 数足够大以表示其等温性质。沿着一组足够的线性代数方程推导出该问题的级数解以确定级数系数。结果显示与有限元模拟非常吻合。将结果与先前报告的近似解在近似解的有效参数范围内进行比较。量化了关键无量纲参数对热扩散阻力的影响。结果表明,正如预期的那样,热扩散阻力随着等温热源尺寸的减小而增加。提出了一种具有非常好精度的三阶多项式相关性。这项工作推进了对过去仅报告了近似解的问题的理论理解。这里给出的结果为涉及扩散或收缩的各种实际热管理问题的热设计和优化提供了实用工具。

青少年冰球运动中冰面定位的物体检测
摘要 运动相关的脑损伤是一个紧迫的问题,特别是在冰球等高强度运动中,撞击速度在确定头部撞击程度和随后的受伤风险方面起着重要作用。然而,现有的测量撞击速度的方法,如 GPS 跟踪和手动视频分析,成本高昂,难以使用,尤其是对于青少年联赛而言。本研究介绍了一种使用计算机视觉从 2D 视频中确定球员速度的自动化、经济高效的方法。第一步是定位场地,通过一种新方法使用 YOLOv5 检测冰面上的特定地标。凭借超过 9,900 张带注释图像的数据集,YOLOv5 表现出色,在 80% 的置信水平下实现了 0.99 的 F1 分数和精确召回率,在 IoU 阈值为 0.5 和 0.5:0.95 时分别实现了 98.5% 和 64.5% 的 mAP 分数。通过每帧检测至少四个地标,计算单应性矩阵以获得自上而下的视图,从而完成定位过程。这种方法实现了 0.96 的平均 IoU,验证了其在现场定位中的准确性,并展示了其在提高冰球撞击速度测量的可及性和成本效益方面的潜力。

检测局部磁场中的铁磁性物体... - Sciendo
在地质研究中,人们采用多种方法来勘探自然资源。大面积研究时会使用飞机、直升机和无人机 ( 无人驾驶飞机 ) 。研究中采用重力、电磁和磁力方法。重力法可以测量地球重力的微小变化 [1]。现代重力仪的灵敏度小于 1 mGal (1 Gal = 10 −2 m/s 2 )。重力仪可以测量接近 10 −6 g 水平的地球重力变化。莫斯科的 Gravimetric Technologies Ltd. 公司是少数几家领先的高灵敏度重力仪制造商之一 [2]。安装在 Cessna 404 飞机上的 GT-1A 重力仪如图 1 所示 [3]。自然资源矿床也是通过应用电磁法发现的。第一个电磁系统出现并开发于 20 世纪 20 年代的斯堪的纳维亚半岛、美国和加拿大。电磁法用于测量土壤的电导率。电磁系统安装在飞机或直升机上。大型线圈由直升机牵引或由飞机携带。线圈中的电流脉冲产生强磁场(一次磁场),该磁场穿透地球各层(图 2)。时变场在土壤中产生涡流。关闭线圈中的电流后,只有涡流产生磁场(二次磁场)
基于人工智能的国土安全 X 射线图像中的物体检测...
数据集来自双能单视图 ECIL 制造的 X 射线行李扫描仪 ECX6040:SVXBIS。对现有数据应用了保留类别的平移和旋转变化,以使 CNN 模型在训练期间暴露于自然变化。计算投影的可行性以确定转换后的特色威胁图像是否完全位于行李区域内。使用威胁图像投影技术将平移和旋转的特色威胁图像投影到干净的图像块上。使用 Beer-Lambert 定律将威胁扫描中像素的强度分为来自威胁及其背景的贡献。使用威胁扫描中背景引起的衰减计算威胁掩模,没有任何容器。然后通过乘法将威胁掩模投影到 X 射线图像中。