XiaoMi-AI文件搜索系统
World File Search System物理模拟

智能手机游戏控制的比较研究
数字技术改变了人类的行为,尤其是产品的特性及其与界面和交互相关的功能。智能手机用户不得不接受触摸屏界面,但没有足够的证据证明这些数字界面比物理模拟界面更有效。此外,智能手机游戏行业推出了带有触摸界面的手机游戏,这些游戏对游戏用户来说可能有效,也可能无效。本研究旨在通过两项可用性测试为智能手机游戏控制的模拟和数字界面之间的有效性寻找实证证据:(a)一项初步研究,比较六名参与者的直接和间接输入控制之间的数据值;(b)一项主要研究,从初步研究的结果中调查数字和模拟输入控制之间仅点击提供的影响。定性和定量研究方法都用于分析可用性测试。共有 81 名参与者参加了主要研究,并分为两大组,比较单手和双手输入控制。每组九名参与者玩基于不同输入控制任务的智能手机游戏。本研究发现,直接触摸屏交互对于双手输入控制任务更有效,而间接物理输入控制对于单手输入控制任务更有效。
2022 年 12 月 12 日 海军 - 1 N23A-T001 数字工程
OUSD (R&E) 关键技术领域:通用作战要求 (GWR) 目标:开发一种创新工具,该工具可以从计算机辅助设计 (CAD) 几何图形中自主生成通用网格,并具有自适应全局和局部细化功能,用于耦合气动热结构分析和优化,从而实现基于虚拟现实 (VR) 的实时交互式设计。描述:多学科设计、分析和优化 (MDAO) 可以加速飞机开发的数字工程。高超音速飞机 MDAO 的核心组成部分是涉及高速空气动力学、结构动力学和热力学之间相互作用的多物理模拟。航空结构热模拟可以大幅减少地面和飞行中的测试,因为功能更强大的高性能计算 (HPC) 硬件可以提供更高的几何和物理复杂性分辨率 — — 例如,如果 1980 年代飞机的 10 厘米精度是标准,那么 1 毫米的几何精度和 1 微米的边界层分辨率现在已很常见。然而,这些不断增加的几何精度要求和物理复杂性对网格生成提出了巨大挑战 [参考文献 1–2]。根据 NASA CFD Vision 2030 [参考文献 3],网格生成和自适应性仍然是计算流体动力学 (CFD) 工作流程中的重要瓶颈。一方面,自主和几何感知的网格生成技术仍然缺乏。生成

µSim:一个通过肌肉骨骼建模阐明运动神经控制的目标驱动框架
运动皮层 (MC) 如何在动态环境中从复杂的肌肉骨骼系统产生有目的且可推广的运动?为了阐明潜在的神经动力学,我们使用目标驱动的方法来对 MC 进行建模,将其目标视为控制器,通过期望状态驱动肌肉骨骼系统以实现运动。具体来说,我们将 MC 制定为循环神经网络 (RNN) 控制器,该控制器产生肌肉命令,同时接收来自生物学上准确的肌肉骨骼模型的感觉反馈。鉴于在高级物理模拟引擎中实现的这种实时模拟反馈,我们使用深度强化学习来训练 RNN,以在指定的神经和肌肉骨骼约束下实现所需的运动。训练模型的活动可以准确解码实验记录的神经群体动态和单个单元 MC 活动,同时很好地推广到与训练明显不同的测试条件。同时进行目标和数据驱动的建模,其中我们使用记录的神经活动作为 MC 的观察状态,进一步增强了直接和可推广的单个单元解码。最后,我们表明该框架阐明了神经动力学如何实现灵活控制运动的计算原理,并使该框架易于用于未来的实验。
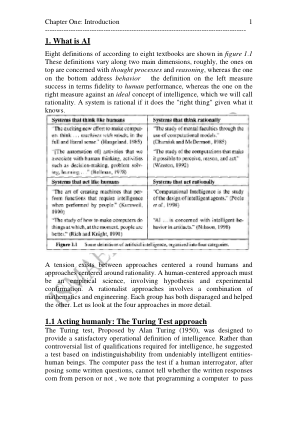
1. 什么是人工智能 1.1 像人一样行动:图灵测试方法
自然语言处理,使其能够成功地用英语交流; 知识表示,用于存储它所知道或听到的内容; 自动推理,使用存储的信息来回答并得出新的结论; 机器学习,用于适应新情况并检测和推断模式。图灵测试故意避免询问者与计算机之间的直接物理交互,因为皮尔逊的物理模拟对于智能来说是不必要的。然而,所谓的全面图灵测试包括视频信号,以便询问者可以测试受试者的感知能力,以及询问者将物理对象“通过舱口”的机会。通过将询问者与机器和其他人类参与者隔离开来,测试确保询问者不会受到机器外观或其声音的任何机械特性的影响。然而,询问者可以自由地提出任何问题,无论问题多么狡猾或间接,以努力揭露计算机的身份。例如,询问者可能会要求两名受试者进行一项相当复杂的算术计算,假设计算机比人类更有可能做出正确的回答;为了对抗这种策略,计算机需要知道什么时候它应该无法得到这类问题的正确答案,以便看起来像人类。为了根据情感性质发现人类的身份,询问者可能会要求两名受试者对一首诗或一件艺术品做出反应;这种策略要求计算机了解人类的情感构成。
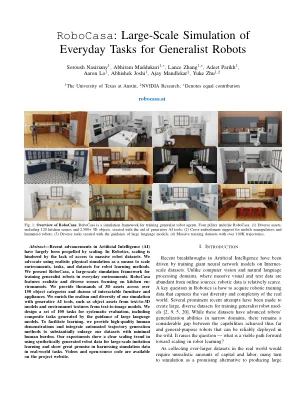
Robocasa:通才机器人日常任务的大规模模拟
摘要 - 人工智能(AI)的遗留进展很大程度上是通过缩放来推动的。在机器人技术中,由于缺乏对大型机器人数据集的访问而阻碍了缩放。我们提倡使用现实的物理模拟作为机器人学习方法扩展环境,任务和数据集的一种手段。我们提出了Robocasa,这是一个大规模的模拟框架,用于在日常环境中培训通用机器人。Robocasa以厨房环境为重点的现实和多样化的场景。我们提供了150多种对象类别以及数十个可相互作用的家具和设备的数千个3D资产。我们使用生成的AI工具来丰富模拟的现实性和多样性,例如文本到3D模型的对象资产以及来自文本图像模型的环境纹理。我们设计了一组100个用于系统评估的任务,包括大型语言模型指导产生的复合任务。为了促进学习,我们提供了高质量的人类示范,并整合自动轨迹生成方法,以实质上扩大我们的数据集的人类负担最小。我们的实验显示了使用合成生成的机器人数据进行大规模模仿学习的明确缩放趋势,并在利用现实世界任务中的仿真数据方面显示出巨大的希望。视频和开源代码可在项目网站上找到。

一眼实验室
世界上首要的高性能计算设施之一劳伦斯·利弗莫尔(Lawrence Livermore)是Livermore Computing(LC)的所在地,Livermore Computing是世界上最重要的高性能计算设施之一。LC拥有188多个PETAFLOPS的计算能力和许多Top500系统,包括125-Petaflop Sierra。继续延续世界一流的LLNL超级计算机的长血统,塞拉代表了通往Exascale Computing道路的倒数第二步,预计将在2023年通过称为El Capitan的LLNL系统实现。这些旗舰系统具有GPU的支持,并以3D的形式在从未见过的各种关键任务需求的情况下进行了多物理模拟。在2020年,LLNL和小脑系统将世界上最大的计算机芯片集成到Lassen系统中,并使用尖端的AI技术升级顶级超级计算机。这种组合创造了一种根本新型的计算解决方案,使研究人员能够研究新颖的预测建模方法。这些平台得到了我们的LEED认证,创新的基础设施,权力和冷却设施的支持;一个存储基础架构,包括三种文件系统和世界上最大的tfinity磁带档案;和顶级客户服务。我们的行业领先软件生态系统展示了我们对许多大型开源工作的领导,从折腾和ZFS到R&D 100屡获殊荣的SCR和SPACK。

对多阶段轴向压缩机空气动力学的深度学习建模和建立变化
深度学习对物理模拟(例如计算流体动力学)的应用最近引起了人们的兴趣,并且在不同领域中证明了它们的生存能力。但是,由于高度复杂,湍流和三维流,尚未证明它们可用于涡轮机械应用。用于燃气轮机应用的多阶段轴向压缩机代表了一个非常具有挑战性的情况,这是由于几何和操作变量的流场回归的高差异性。本文展示了深度学习框架的开发和应用,以预测多阶段轴向压缩机的流动场和空气动力学性能。一种基于物理的降低性降低方法解锁了流场预测的潜力,因为它将回归问题从非结构化的问题重新构建为结构化的问题,并减少了自由度的数量。与传统的“ Black-Box”替代模型相比,它通过识别相应的空气动力学驱动程序来为整体性能的预测提供解释性。该模型适用于制造和建造变化,因为已知相关的性能散布对CO 2排放产生重大影响,这构成了巨大的工业和环境相关性的挑战。事实证明,所提出的体系结构可实时实现与CFD基准的准确性,以实时与工业相关的应用。部署的模型很容易集成到燃气轮机的制造和建造过程中,从而提供了通过可行和可解释的数据来分析评估对性能的影响的机会。

一眼实验室 - 劳伦斯·利弗莫尔国家实验室
世界上首要的高性能计算设施之一劳伦斯·利弗莫尔(Lawrence Livermore)是Livermore Computing(LC)的所在地,这是一家首要的高性能计算设施。LC拥有200多个PETAFLOP的计算能力和许多Top500系统,包括125-Petaflop Sierra系统。继续世界一流的LLNL超级计算机的血统,塞拉代表了Exascale Computing道路上的倒数第二步,预计将通过称为El Capitan的LLNL系统在2023年实现。这些旗舰系统具有GPU的支持,并以3D的形式在从未见过的各种任务需求的情况下进行了多物理模拟。在2020年,LLNL和小脑系统将世界上最大的计算机芯片集成到Lassen系统中,并使用尖端的AI技术升级顶级超级计算机。这种组合创造了一种根本新型的计算解决方案,使研究人员能够研究新颖的预测建模方法。这些平台得到了我们的LEED认证,创新的基础设施,权力和冷却设施的支持;一个存储基础架构,包括三种文件系统和世界上最大的tfinity磁带档案;和顶级客户服务。我们的行业领先的软件生态系统展示了我们对许多大型开源工作的领导,从与光泽和ZFS一起抛弃到R&D 100屡获殊荣的Flux,SCR和SPACK。

通过 IBM 量子计算机上的通勤泡利弦进行量子程序测试
量子计算最有前途的应用集中在解决搜索和优化任务上,特别是在物理模拟、量子化学和金融等领域。然而,目前的量子软件测试方法在工业环境中应用时面临实际限制:(i)它们不适用于与行业最相关的量子程序,(ii)它们需要完整的程序规范,而这些程序通常无法获得,(iii)它们与 IBM 等主要行业参与者目前采用的错误缓解方法不兼容。为了应对这些挑战,我们提出了一种新颖的量子软件测试方法 QOPS。QOPS 引入了一种基于 Pauli 字符串的测试用例的新定义,以提高与不同量子程序的兼容性。QOPS 还引入了一种新的测试 oracle,它可以直接与 IBM 的 Estimator API 等工业 API 集成,并可以利用错误缓解方法在真实的噪声量子计算机上进行测试。我们还利用泡利弦的交换特性放宽了对完整程序规范的要求,使 QOPS 可用于在工业环境中测试复杂的量子程序。我们对 194,982 个真实量子程序进行了 QOPS 实证评估,与最先进的程序相比,它在测试评估中表现出色,F1 分数、准确率和召回率都堪称完美。此外,我们通过评估 QOPS 在 IBM 的三台真实量子计算机上的性能来验证其工业适用性,结合了工业和开源错误缓解方法。
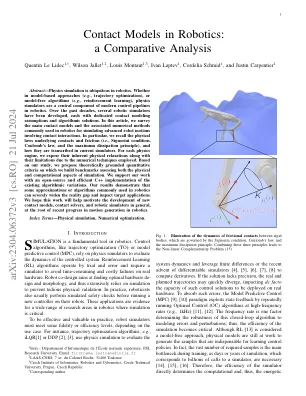
机器人技术中的联系模型:比较分析
摘要 - 物理模拟在机器人技术中无处不在。在基于模型的方法中是否(例如,轨迹优化)或无模型算法(例如,增强学习),物理模拟器是机器人技术中现代控制管道的核心组成部分。在过去的几十年中,已经开发了几个机器人模拟器,每个模拟器都有专用的接触建模假设和算法解决方案。在本文中,我们调查了主要的接触模型以及在机器人技术中常用的相关数值方法,用于模拟涉及接触相互作用的高级机器人运动。特别是我们回想起接触和摩擦的物理定律(即,Signorini条件,库仑定律和最大耗散原则),以及如何在当前的模拟器中转录它们。对于每种物理引擎,由于使用的数值技术,我们暴露了它们固有的身体放松以及它们的局限性。基于我们的研究,我们提出了理论上基础的定量标准,在该标准上我们构建了评估模拟物理和计算方面的基准。我们通过现有算法变化的开源和有效的C ++实现来支持我们的工作。我们的结果表明,在机器人技术中常用的某些近似值或算法可以严重扩大现实差距并影响目标应用程序。我们希望这项工作将有助于激励新的接触模型,联系求解器和机器人模拟器的开发,这是机器人技术中最新动态进展的根源。