XiaoMi-AI文件搜索系统
World File Search System电控制

用于神经形态计算的重金属异质结构
提出了一种基于反铁磁/重金属 (AFM/HM) 异质结构的光触发和电控制超快神经形态计算处理器的概念。基于 AFM/HM 的人工神经元由短 THz 范围脉冲激发,从而触发 AFM 中的进动。HM 层中的偏置电流可用于修改进动的共振频率。进动通过逆自旋霍尔效应转换为 HM 层中的电流。因此,提出了一种神经形态处理器模型,该模型由基于 AFM 的兴奋性人工神经元(振荡器)和处理神经元(检测器)组成。我们表明,使用光激发可以在低功耗下显著提高神经形态计算的处理速度。演示了最简单逻辑运算(OR、AND)的实现示例。

异质结构中的扭曲角 - 依赖性山谷极化切换
Moiré超级晶格在Van der Waals的异质结构中的扭曲工程可以操纵山谷中层Incepitons(IXS)的山谷物理学,为下一代谷化设备铺平了道路。然而,到目前为止,在电气控制的异质结构中尚未研究对山谷极化上激素电位的扭曲角度依赖性控制,需要探索下面的物理机制。在这里,我们证明了莫伊尔时期的极化切换和山谷极化程度的依赖性。我们还找到了揭示激子电势和电子孔交换相互作用的扭曲角度调节的机制,这些机制阐明了实验观察到的IXS的扭曲角度依赖性山谷极化。此外,我们根据极化开关实现了可谷化的设备。我们的工作通过在电控制异质结构中调谐扭转角来证明了IXS山谷极化的操纵,这为在互惠设备中开放了电气控制山谷自由度的途径。

EPP3 高流量系列 G1、G2 电动气动压力...
EPP3 - 高流量系列是一系列电动遥控气动压力调节器。EPP3 调节器允许根据电控制信号按比例调节出口压力。它包括一个集成的闭环电子控制和两个脉冲宽度调制的 2 通电磁阀。压力传感器测量出口压力并向差分放大器提供反馈信号。控制信号和反馈信号之间的任何差异都会转换为数字信号,以激励一个或另一个 2 通阀的线圈。然后立即对出口压力进行软校正,而不会过冲。模拟控制信号可以是电压 (0-10V) 或电流 (4 - 20 mA)。“填充阀”的入口直接连接到调节器的主入口 P。通电后,该阀门将增加出口 A 处的压力。“排气阀”通电后,出口 A 处的压力将降低。压力将通过位于盖子和主体之间的排放槽排出,并直接排入大气,无需消音器。主调节压力的排放将通过排气 R 进行。电磁阀确保伺服腔的填充或排空,以增加或减少调节器出口处的压力。在阀门的静止位置,所有端口都被阻塞。
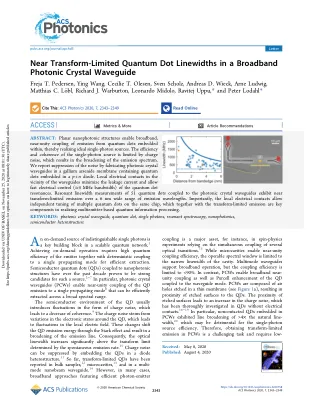
宽带光子晶体波导中近变换极限量子点线宽
摘要:平面纳米光子结构能够实现嵌入量子点的宽带、近乎统一的辐射耦合,从而实现理想的单光子源。电荷噪声限制了单光子源的效率和相干性,从而导致辐射光谱变宽。我们报告了通过在包含嵌入 ap - i - n 二极管的量子点的砷化镓膜中制造光子晶体波导来抑制噪声的方法。波导附近的局部电接触可最大限度地减少漏电流,并允许快速电控制(≈ 4 MHz 带宽)量子点谐振。耦合到光子晶体波导的 51 个量子点的谐振线宽测量在 6 nm 宽的辐射波长范围内表现出接近变换极限的辐射。重要的是,局部电接触允许在同一芯片上独立调谐多个量子点,这与变换极限辐射一起成为实现基于多发射器的量子信息处理的关键组成部分。关键词:光子晶体波导、量子点、单光子、共振光谱、纳米光子学、半导体异质结构

2D铁电器中的新兴多功能性
2D铁电材料分别与磁性/valleytronics,力学和光学的耦合,在信息存储,传感器技术和光电子化中呈现了有希望的应用。2D铁电与磁性的整合通过启用电场控制的磁状态来增强存储设备中的数据存储密度。铁电 - 瓦利耦合通过利用山谷极化的电控制,对高速,低能电子电子设备有望。铁电 - 应变耦合会导致各种极性拓扑,并在高密度数据存储技术和传感器设备中使用潜在的应用。此外,铁电和光学之间的耦合促进了基于铁电材料的非线性光子学的发展。本综述总结了耦合机制中最新的理论进步,包括dzyaloshinskii-moriya-interaction诱导的磁电耦合,与对称性相关的铁电 - 触发器耦合,通过互动式极高的拓扑结构,以及第二个型号,通过互动式互动。提供了为多功能应用的2D铁电材料中耦合的当前挑战和未来的机会。
CHIP HYDE VISION 3D 使用说明
您已获得一套套件,该套件在配备合适的配件后可组装成一个功能齐全的 R/C 模型,如套件随附的说明书中所述。但是,Chip Hyde Products Inc. 无法影响您构建和操作模型的方式,我们无法控制您安装、操作和维护无线电控制系统组件的方法。因此,我们有责任拒绝承担因不当或不正确使用和操作我们的产品而导致的损失、损害或费用,或与此类操作相关的损失、损害或费用。除非有约束力的法律另有规定,否则 Chip Hyde Products Inc. 不承担赔偿义务,无论采用何种法律论据。这适用于人身伤害、死亡、建筑物损坏、营业额和业务损失、业务中断或其他直接和间接的后续损害。通过操作此模型,您将对自己的行为承担全部责任。重要的是要明白,Chip Hyde Products Inc. 无法监控您是否遵循本说明书中有关飞机构造、操作和维护的说明,也无法监控您是否正确安装和使用无线电控制系统。因此,Chip Hyde Products Inc. 无法保证或与任何个人或公司签订合同协议,以确保您制作的模型

用于……的大型无人电动特技飞行器
本文介绍了一种 35% 大小的大型无人特技飞行平台 UIUC Aero Testbed 的开发,该平台主要用于在全飞行状态下进行空气动力学研究。该巨型飞机翼展 105 英寸(2.7 米),重量 37 磅(17 千克),由市售的无线电控制模型飞机制成,并进行了大量修改和升级,包括一个 12 千瓦的电动机系统,可提供超过 2 比 1 的推重比。它配备了一个航空电子设备套件,其中包含一个高频、高分辨率六自由度 (6-DOF) 惯性测量单元 (IMU),可让系统收集飞机状态数据。该信息集可用于生成高保真空气动力学数据,可用于验证大迎角飞行动力学模型。该项目的合作还使 Aero Testbed 具备了全自主和半自主飞行的能力,以便开展自主飞行研究。首先介绍了用于研究的特技无人机的文献综述。然后讨论了开发该平台的背景和动机。接下来是对所涉及的规划和开发的描述。最后,介绍了初步试飞结果,其中包括几次特技动作的飞行路径轨迹图。

RT-7000 机载战术无线电 - EDMO
Cobham 的 RT-7000PMR(面板安装无线电)支持从 29.7 MHz 到 960 MHz 的全频谱 VHF 和 UHF、AM/FM 通信,最多可配备三 (3) 个嵌入式和独立收发器,在一个紧凑的外形中提供相当于三 (3) 个独立无线电的功能。此外,RT-7000PMR 还支持一键通功能,可即时连接最多两个 (2) 个外部设备,例如手持式无线电、移动电话或 SATCOM 手机。RT-7000PMR 包括一个集成的全彩色、符合 NVIS Green B 标准的无线电控制显示器/图形用户界面 (GUI)。由于 RT-7000PMR 是软件定义无线电,因此可以单独定制 GUI 以满足操作员的独特要求。所有 RT-7000PMR 命令均由触摸屏显示器或易于使用的双同心前面板旋钮支持。所有用户控制功能和操作均在三个 (3) 菜单选项中支持。作为软件定义无线电,RT-7000 系列可随着需求的发展而升级。当模块过时时,您不需要新的无线电或培训……您将通过易于实施的软件或模块升级/添加来保持最新技术。

无人空中和地面系统及反...
可以连接任何支持 TCP/IP 的设备。带备用系统的导航。发动机故障时设备安全。可在一天中的任何时间和各种气候条件下使用。可以快速集成到其他控制系统中。提供用于信息交换的卫星频道。提供 ADS-B 接收器。通过互联网传输数据的能力。在线分析接收到的数据并存档。将所有显示对象绑定到地理坐标和时间。根据使用条件,以 480p、720p、1080p、4K 格式传输数据。以 4K (QFHD) 录制和保存信息。整个硬件的 UAV CAN 总线可提高数据交换和诊断速度。操作模式 - 自动、半自动或手动(安全通道无线电控制)。实时监视和侦察、目标检测、识别、鉴别和捕获。通信:GNSS - GPS/GLONASS、IRIDIUM(选项);链接 - 数字、安全、AES 代码。20 倍光学变焦、高分辨率控制 4K 视频摄像头,陀螺稳定在 3 轴平台上。4 倍数码变焦热传感器,第 4 代,640x480 分辨率。>25Hz 无人机 - IP53,GCS - MIL.STD.810F。

Pilot-1:自主固定翼飞机控制系统
在过去十年中,美国和世界各地的无人机个人拥有量呈爆炸式增长。集成电路、传感器和嵌入式微控制器的尺寸和成本迅速下降,导致业余爱好者社区蓬勃发展,他们设计飞行控制器的复杂程度接近政府和军事应用的水平。典型的飞行辅助控制器集成了来自用户控制系统和惯性测量单元 (IMU) 的数据,以保持飞行器水平和航向。旋翼和固定翼系统的飞行控制技术主要源自无线电控制 (RC) 业余行业,通常由社区构建和开源。虽然这导致快速开发和易于修改,但质量通常会受到影响。由于社区不是专业人士社区,最佳编码实践经常被遗忘,导致意外故障。这种飞行控制系统不适合集成到美国领空,因为它们容易发生故障,并且无法缓解飞行控制面的故障。固定翼系统也可以在没有机载飞行控制器或自动驾驶仪的情况下进行控制,只需一个简单的摄像头下行链路和直接控制面控制即可满足大多数第一人称视频 (FPV) 需求。这给此类控制器的市场留下了一个空白,所有产品都缺乏冗余和故障缓解等专业功能。我们的项目