XiaoMi-AI文件搜索系统
World File Search System积分器

Nesterov型加速度方法的快速符号积分器
摘要在本文中,为在提高Nesterov加速梯度方法的收敛速率时,提出了基于符号和接触差异的显式稳定积分器。符合性几何形状适用于描述Ham-iLtonian力学,接触几何形状被称为奇异的几何形状。一种称为符合性的程序是一种已知的方法,可以从触点歧管中构建符号歧管,从接触膜构造自动式哈密顿系统。在本文中发现,先前研究的非自主odes可以写为汉密尔顿系统家庭。然后,通过开发和应用表达非自主odes的非自主接触的符合性,并实现了新型的符号积分。由于所提出的符号积分器保留了ODES中隐藏的符号和接触结构,因此预计它们比Runge -Kutta方法更稳定。数值实验表明,正如预期的那样,二阶符号积分器是稳定的,并且达到了高收敛速率。

指数积分器中线体函数的方向分裂...
vec是将输入矩阵的列堆叠在单个向量中的操作员。具有Kronecker和结构的系统在应用线路方法上近似于在张量产品域和适当的边界条件上定义的部分微分方程(PDE)的解时,通常也会出现。的确,在众所周知的抛物线方程(例如Allen-Cahn,Brusselator,Gray-Scott,Advection-Affection-Exfusion-Reaction [8,10]或Schrödinger方程[6])的空间中,我们获得了ODES的大僵硬系统(1)。一旦给出了系统(1),就可以使用许多技术来及时整合它,尤其是我们对指数积分器的应用感兴趣[19]。实际上,它们是执行所需任务的重要方法,因为它们享有有利的稳定性,使它们适合在僵硬的制度中工作。这些方案需要计算矩阵指数和向量上的指数状矩阵函数(所谓的线体函数)的作用。它们是定义的,对于通用矩阵x∈Cn×n,为
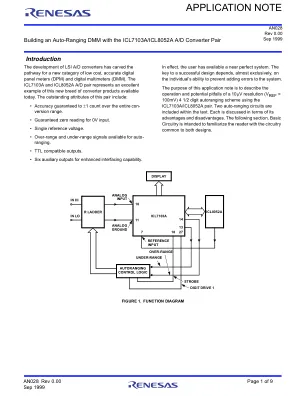
使用 ICL7103A/ICL8052A 构建自动量程 DMM
ICL7103A/ICL8052A A/D 转换器的基本电路保持不变。但是,需要进行一些修改以适应 100mV 参考。首先,修改参考电压分压器网络 (5.1k、1k) 以获得更高的分辨率。其次,将积分器电阻减小到 10k ,以便在 V IN = 200mV 时实现大约 8V 的积分器摆幅。第三,应使用 300k 电位器替换比较器转换网络中的 300k 固定电阻。当 V IN = 0V 时,应调整此电位器,直到显示屏读取相等间隔的正负符号。在自动归零期间,此网络将比较器输出提升至 ICL7103A 逻辑的阈值。连接在积分器电容上的两个 JFET 在严重超量程情况下保持积分器和自动归零电容的完整性。


技术杂志 - 使用...
©2015 Penerbit Utm出版社。保留的所有权利1.0简介时间标记发生器用于触发单声,SCR,IGBT,GTO,CRT的扫流电压等[1]。使用比较器,集成器和剪子生成正弦波输入的时间标记。比较器中的方波输出应用于RC系列电路的输入。如果串联电路的时间常数小于正弦波输入的时间段t,则RC网络充当积分器。因此,积分器的输出是一系列正脉冲和负脉冲。这一系列的脉冲应用于剥离的负脉冲的剪子电路,然后最终输出是阳性脉冲的火车,确保持续时间与输入正弦信号的时间段等于时间t。通常,该电路很容易使用操作放大器(op-

三重电传操纵备用控制系统
三个备用控制系统通道的每个轴上的积分器提供电子配平、均衡和同步。当主通道接通时,备用控制系统伺服命令与这些积分器的主伺服命令同步。这些输入到备用控制系统表决器中,即使控制传感器输出和系统间控制规则存在差异,它们仍会跟踪主通道伺服命令。在从主控制系统切换到备用控制系统期间,必须将备用控制系统与主控制系统持续同步,以尽量减少控制面瞬变。如果主系统发生故障或飞行员命令脱离,就会发生切换。同步网络的带宽约为 2.5 赫兹

集成铌酸锂微波光子处理引擎
图 1. 晶圆级基于 LN 的 MWP 信号处理引擎及其构建模块。a 基于 LN 的 MWP 处理引擎示意图,由将模拟电子信号忠实地转换为光域的高速 EO 调制部分和低损耗多用途光子处理部分组成。b 使用紫外步进光刻系统对 4 英寸晶圆级 LN 光子集成电路进行图案化拍摄。c 我们高速 MWP 系统基本构建模块的显微镜图像和关键性能指标,包括固有品质因数 ~ 6 × 10 6 的微谐振器、用于信号编码的低驱动电压和宽带强度和相位调制器、作为积分器的分插环谐振器、作为微分器的非平衡 MZI,以及作为二阶积分器和微分器的级联环和 MZI。 d 设备的假彩色扫描电子显微照片(SEM),分别显示波导的侧壁、微谐振器的耦合区域、波导和多模干涉(MMI)耦合器的横截面图。


使用元素锑
摘要:在过去的十年中,包括5G在内的Modern电信技术的扩散以及广泛采用The Internet(IoT)导致了数据生成和传播的前所未有的激增。这次激增创造了对高级信号处理能力的不断升级需求。微波处理(MWP)处理器提供了一种有希望的解决方案,以满足资本对高带宽和低潜伏期对光学系统可实现的史无前例的数据处理需求。在这项工作中,我们引入了使用Ele-thickimony的全光RF过滤的集成MWP处理单元。我们利用了锑的结晶动力学来证明光子泄漏的积分器,该积分器被认为是作为一阶低通量过滤器,带宽为300 kHz,超紧凑型足迹为16×16μm2。我们通过实验证明了这种过滤器作为包膜检测器的实现,以解调振幅调节信号。最后,提出了有关实现带宽可调性的讨论。
RACSY19C 应用物理学 – 相关课程 III 第一单元
基本运算放大器 – 反相和非反相运算放大器 – 差分运算放大器 – CMRR – 运算放大器作为符号和比例变换器移相器积分器的基本用途。微分器和加法器 D/C – 二进制加权方法 – R-2R 梯形法 – A/C 逐次逼近和计数器方法 – OpAmp 作为比较器 学习书籍: