XiaoMi-AI文件搜索系统
World File Search System系统开发

使用机器学习的老年人的可视化风险预测系统开发:基于Charls
肌肉减少症已成为老年人的重要健康问题,其特征是肌肉质量降低,肌肉力量降低和逐渐的身体机能下降(1,2)。这种退化性状况严重限制了移动性,增加了跌倒和断裂的风险,并可能导致生活质量下降和死亡率较高(3)。在中国,随着迅速衰老的过程,肌肉减少症的流行率仍然很高,对医疗保健系统和家庭护理承担了重大负担(4)。迅速确定高风险的人并采用科学干预措施,例如增加蛋白质摄入和增强的体育锻炼,可以帮助维持健康的肌肉状况并降低肌肉减少症的风险(5,6)。随着大数据和人工智能的快速发展,基于健康数据的机器学习模型显示出疾病风险评估的巨大潜力(7,8)。

成果报告便携式超紧凑型生物质气化发电系统开发
对含水量极高的食物垃圾进行碳化和造粒的成功,这在以前是没有开发过的,导致了环境部项目中这项研究成果的发展,以及在这项研究成果开辟了不仅应用于灾区,而且广泛应用于世界各地民用领域的可能性。 另一方面,即使产生的气体含有微量焦油,约1至2g/Nm 3 ,在运行约50小时后,焦油沉积在各种装置上的问题变得明显,这是从未报道过的。气化炉连续运行100小时后首次变得清晰。此外,还首次发现硬质合金球团成型时添加的粘结剂会导致球团气化时焦油生成量增加。今后,我们将明确设备长期稳定运行的对策和问题。完成了。这可以说是一个为未来研发提供指导的重大成果,是短期设备运行所无法看到的。 1.4 研究成果,如论文、专利、会议报告等。该研究成果发表在《Applied Energy》杂志上两篇文章(影响因子=7.182)、《Fuel》杂志上两篇文章(影响因子=4.601)和《Energy》 & Fuels杂志(影响因子=4.601)在著名英文期刊上共发表学术论文5篇,其中影响因子=3.091)。 此外,被聘为博士后的陆丁先生在任职期间发表了三篇学术论文,如今转行其他工作,他仍在根据这项研究成果撰写学术论文,并且参与这项研究项目对年轻研究人员的发展做出了巨大贡献。 此外,作为这项研究的结果,我们已经提交了一项专利申请,如附件 3 所示。

通过辅助技术促进痴呆症患者的活动:一种从概念设计到系统开发的全面方法
我在此解释说我已经独立写了这项工作,我已经完全指定了有用的资源和辅助工具,并且我肯定已经担任了工作的立场 - 包括表,地图和插图 - 在措辞或含义中,其他作品或互联网在任何情况下,无论如何将其表示为借款。我进一步解释说,我只使用生成的AI工具作为工具,而我在当前工作中的创造力主要超过了我的创造性影响。在附录“概述使用的艾滋病”中,我列出了所有使用的生成AI工具,并指示了它们的使用方式以及如何使用。对于没有实质性更改的文本段落,我指定了输入(提示)以及与您的产品名称和版本号/日期一起使用的IT应用程序。
使用地热热泵的地区能源系统开发尺寸和建模平台:预印本
现有的社区或城市规模能源系统建模和仿真工具通常受到限制,并且需要专家级建模的能力来开发系统模型。为了帮助填补这一空白,我们建议使用地热热泵的地区能源系统进行集成的尺寸和建模平台。所提出的平台使用与建筑物,孔菲尔德和地区能量循环有关的几何和非几何用户输入。平台大小大小,地热交换机,生成相应的区域能源系统模型,并自动运行年度模拟。我们平台上的Borefield组件模型已针对EnergyPlus进行了验证,以确保可靠的模拟性能。在本文中提供了一个案例研究,以证明所提出的平台的工作流和模拟结果的合理性。
可扩展和可配置的电气接口板,适用于不同立方体卫星平台的总线系统开发
摘要:九州工业大学的 BIRDS 卫星计划设计了一个经过飞行验证的 1U CubeSat 平台电气总线系统。该总线利用背板作为子系统和有效载荷之间的机械和电气接口。背板上的电气线路由软件使用复杂可编程逻辑器件 (CPLD) 配置。它允许在多个 CubeSat 项目中重复使用,同时降低成本和开发时间;因此,可以将资源用于开发任务有效载荷。最后,它为集成和系统级验证提供了更多时间,这对于可靠和成功的任务至关重要。目前 CubeSat 发射的趋势集中在 3U 和 6U 平台上,因为它们能够容纳多个复杂的有效载荷。因此,有必要演示电气总线系统以适应更大的平台。本研究展示了可配置电气接口板在两种情况下的可扩展性:能够容纳 (1) 多个任务和 (2) 复杂的有效载荷要求。在第一种情况下,设计了一个 3U 大小的可配置背板原型来处理 13 个任务有效载荷。使用四个 CPLD 来管理现有总线系统和任务有效载荷之间有限数量的数字接口。测量的传输延迟高达 20 纳秒,这对于 UART 和 SPI 等简单的串行通信来说是可以接受的。此外,测量的背板每轨道 ISS 的能耗仅为 28 mWh。最后,设计的背板被证明是高度可靠的,因为在整个功能测试中没有检测到任何位错误。在第二种情况下,与 1U CubeSat 平台相比,可配置背板在具有复杂有效载荷要求的 6U CubeSat 中实施。CubeSat 部署在 ISS 轨道上,初步在轨结果表明设计的背板支持任务没有问题。
基于NOAA的统一预测系统开发和实施次生和季节性(S2S)预测系统的状态和计划:
▪灾难侦察报告,当上传时,它可以快速摘要和信息检索[1]。▪对于特定的知识(例如,F级规模和EF尺度之间的统计关系),需要一些上传文档的提示。3。有关天气和气候模拟大型AI模型中最新进展的全面知识,但直到2023年。
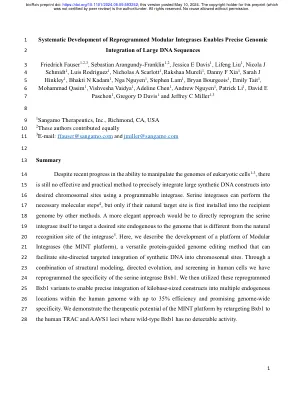
重编程模块化集成酶的系统开发使大型DNA序列的精确基因组整合
未通过同行评审认证)是作者/资助者。保留所有权利。未经许可就不允许重复使用。此预印本的版权持有人(此版本发布于2024年5月10日。; https://doi.org/10.1101/2024.05.09.593242 doi:biorxiv Preprint
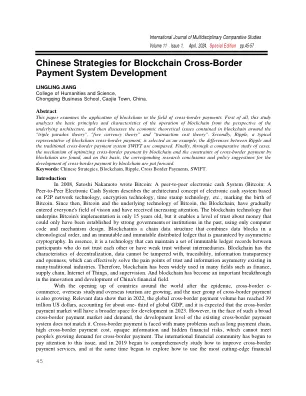
中国区块链跨境支付系统开发的策略lingling朝鲜人文科学学院,重庆商学院
中国跨境支付系统开发的中国策略lingling江版人文与科学学院,重庆商学院,中国卡奥吉镇。摘要本文研究了区块链在跨境支付领域的应用。首先,本研究从基础建筑的角度分析了区块链运行的基本原理和特征,然后讨论了区块链围绕“三重悖论理论”,“自由货币理论”,“自由货币理论”和“交易成本理论”中包含的经济理论问题。其次,Ripple是区块链跨境支付的典型代表,以示例选择,比较了Ripple和传统跨境支付系统Swift之间的差异。最后,通过对案例的比较研究,发现了通过区块链优化跨境支付的机制,以及通过区块链进行跨境支付的约束,在此基础上,提出了相应的研究结论和政策建议,并提出了通过区块链开发跨境支付的建议。关键字:中国策略,区块链,波纹,跨境付款,Swift。简介
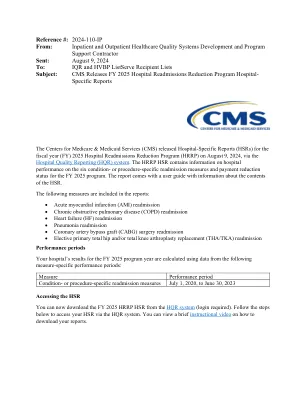
参考#:2024-110-IP来自:住院和门诊医疗保健质量系统开发和计划支持承包商:2024年8月9日t
• Log into the HQR system using your HARP ID credentials and navigate through the steps listed below to download your HSR: - From the left-hand navigation menu, select “Program Reporting” - Then select “Measure details” - Here, you can view your hospital specific reports (HSRs) - Select the release year for your report (for example, select 2024 for the FY 2025 HSR), followed by the program in which you are interested (for example, HRRP)。在“报告”下,您可以看到可下载的文件列表(例如,HRRP HSR)。- 要下载文件,选择“导出”,将通过浏览器下载该文件。下载后,打开zip文件以查看您的网站的信息。