机构名称:
¥ 1.0
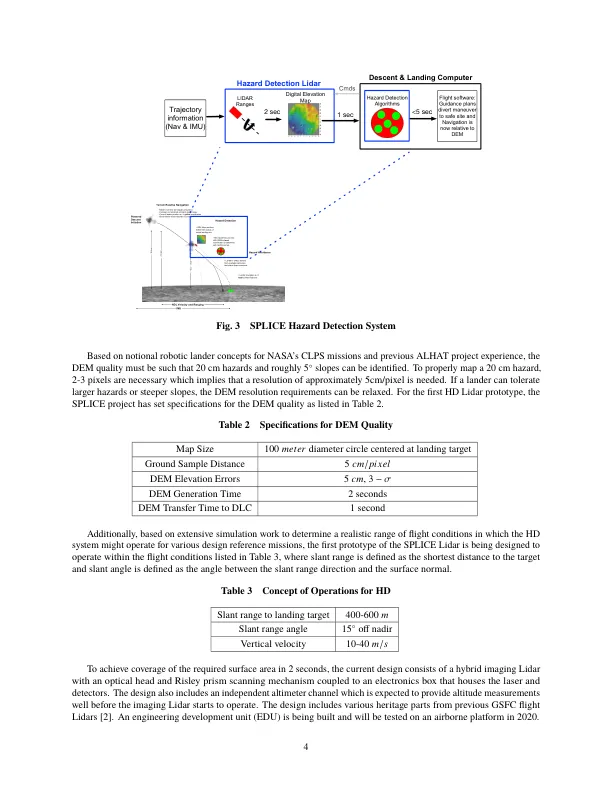
I. 简介 用于精确和安全着陆的制导、导航和控制 (GN&C) 技术对于未来机器人科学和载人探索太阳系各个目的地的任务至关重要。这些进入、下降和着陆 (EDL) 技术是美国宇航局精确着陆和危险规避 (PL&HA) 领域的一部分,被认为是空间技术发展路线图 [1] 的高优先级能力,旨在促进和实现新的任务概念。SPLICE 项目,即安全精确着陆 - 综合能力演进 [2],致力于持续开发传感器、算法和航空电子设备,以用于未来的月球着陆任务。具体来说,SPLICE 正在完善着陆器下降过程中的地形相对导航 (TRN) 和危险检测与规避 (HDA) 的传感器硬件和软件的技术就绪水平 (TRL)。 SPLICE 的所有工作主要基于 NASA 先前在 PL&HA 领域的项目,例如 ALHAT [ 3 – 6 ]、COBALT [ 7 – 10 ] 和 LVS [ 11 ],其中包括多年的传感器开发工作 [12–15] 和各种亚轨道飞行测试。SPLICE 是一套用于精确着陆的 GN&C 技术。表 1 中列出的各个组件可以单独飞行,也可以作为着陆器承载的集成有效载荷飞行。NASA 兰利研究中心开发的导航多普勒激光雷达 (NDL) 提供厘米级的精确速度和测距。NASA 戈达德太空飞行中心开发的危险探测激光雷达 (HDL) 可生成预定着陆目标周围区域的高分辨率数字高程图 (DEM)。 TRN 系统包括摄像头、机载地图和 TRN 算法,这些算法由查尔斯·斯塔克·德雷珀实验室公司为 SPLICE 项目开发和实施 [16]。NASA 喷气推进实验室开发的危险检测算法基于参考文献 [17] 中概述的 ALHAT 算法,并进行了一些修改,以便与新型高清激光雷达 DEM 配合使用并在新型下降和着陆计算机 (DLC) 上运行。约翰逊航天中心开发的 DLC 是一种新型航空电子设备设计,正在开发中,以利用高性能航天计算 (HPSC) 处理器 [18, 19]。随着用于 TRN 和 HDA 的 GN&C 硬件和软件的不断成熟,该项目还在开发高精度模拟环境,包括带有 DLC 的硬件在环 (HWIL) 测试平台和一些在环传感器模拟器。此外,SPLICE 正在对机器人和载人任务的 EDL 架构进行详细建模 [ 20 , 21 ],以确定未来需求,揭示现有技术差距,并推动传感器技术发展,使即将到来的任务受益,例如 NASA 的 Artemis 和商业着陆器有效载荷服务 (CLPS) 计划。图 1 是主机飞行器上 SPLICE 有效载荷的高级示意图。TRN 和 HDA 的图像处理需要大量计算,因此 DLC 的设计旨在通过处理大部分视觉导航算法来减轻主飞行计算机的负担。在 DLC 上运行的飞行软件利用 NASA 核心飞行
下一代 NASA 危险探测系统开发
主要关键词




相关文件推荐