XiaoMi-AI文件搜索系统
World File Search System约束
MSP 3.1.8使用力和约束
化学剂 - 例如正氯苯二甲腈(CS),通常称为催泪瓦斯。这是一种刺激性,可能会引起眼睛的灼热感和撕裂,鼻子,口腔和喉咙的粘膜刺激,从而导致咳嗽,鼻粘膜排出,迷失方向和呼吸困难。导电能量设备 - 小于使用电流的致命武器系统。这些高压电流的短爆发导致神经肌肉丧失能力。通常,短爆发在5到20秒之间或制造商指定。致命的力量 - 可以合理地期望造成严重伤害或死亡的力。残疾 - 有关残疾的定义和解释,请参见DOC 3.3.15美国残疾人法案罪犯的住宿。文档 - 出于此程序的目的,报告诸如事件,医学评估,纪律违规以及武力信息的使用,或事件的照片和/或录像带,包括所有识别相关证据的信息。值班官员 - 计划在紧急呼叫中呼吁的班次指挥官。护送技术 - 在移动囚犯时确保对囚犯的适当控制。在需要进一步控制的情况下,这些技术也可以使用。可扩展的接力棒 - 由圆柱外轴组成,其中包含望远镜的内轴,它们在扩展时彼此锁定。flex袖口 - 在紧急情况下或其他约束时使用的柔性材料制成的临时约束。高级工作人员 - 出于此程序的目的,包括看守,副守望者,局局长,上尉,中尉和参谋长。立即使用武力 - 时间和环境不允许高级工作人员进行预先计划,咨询或批准。
汇总功能约束 - 实施
ISO开发了骨料功能约束,作为混合资源计划的组成部分。1阶段的一期混合资源计划引入了汇总能力约束,该约束为ISO提供了更大的灵活性,可以建模共同层次的资源。约束允许ISO建模单独的资源在单个生成设施中共同存在的单独资源的总功能,以作为其日期和实时市场的一部分。通过使用此约束,共同确定的资源的合并最大工作水平可能超过生成设施的互连服务能力。在开发此约束之前,ISO要求在单个互连处的各种资源ID的最大生成水平(PMAX)的总和不超过互连服务容量限制。该规则已适当,以确保市场软件不会向单个互连背后的资源发布不可行的调度说明,因为它们否则将超过生成设施所研究的互连服务能力限制。ISO委员会在2020年7月的会议上批准了混合资源计划的第一阶段。2 ISO在2020年秋天实施了该软件以实现总体功能约束。


与气候的韧性有关的约束 -
气候变化对下部Ouémé山谷中人口的健康产生负面影响。这些对自然和物理系统的影响会影响脆弱的人,并使他们更多地暴露于营养不良,媒介传播,不可传播,饮食传播或水传播疾病和人畜共患病的风险。,限制了医院传染风险的控制的约束是什么?这项研究是卫生社会学的一部分,旨在改善Ajjohoun,Bonou和Dangbo健康区域对疟疾,心血管疾病和急性呼吸道感染的弱势当地社区的韧性。方法论方法基于定量数据和话语分析,以确定医院和卫生中心的组织和技术能力。在03个市政当局中,总共有93个参与者,每个市政当局随机捕获31人。来源进行三角剖分后,结果表明,气候信息与疾病监测的整合使健康预警系统有效。然后,加强卫生人员的运营能力,以确保人口对气候风险的弹性至关重要。最后,通过提供适合气候变化的可持续设备和技术来提高健康中心的技术能力是应对新的健康挑战的一种方式。
缺口约束下的延展性耗尽...
为了研究总应变对钢的机械和冶金性能的影响,并将这些变量与钢的脆性联系起来,船舶结构委员会正在布朗大学资助一个名为“宏观断裂基础”的项目。“随函附上第五份进度报告 SSC-173 的副本,C 撰写的“缺口约束下均匀预应力下的延展性耗尽”。Mylo~as,S。Kobayashi 和 A. E. Armenakas。

约束抽样强化学习
在线强化学习 (RL) 算法通常难以部署在复杂的面向人类的应用程序中,因为它们可能学习缓慢并且早期性能较差。为了解决这个问题,我们引入了一种实用的算法,用于结合人类洞察力来加速学习。我们的算法,约束抽样强化学习 (CSRL),将先前的领域知识作为 RL 策略的约束/限制。它采用多种潜在的策略约束来保持对单个约束错误指定的鲁棒性,同时利用有用的约束来快速学习。给定一个基础 RL 学习算法(例如 UCRL、DQN、Rainbow),我们提出了一种具有消除方案的上限置信度,该方案利用约束与其观察到的性能之间的关系来自适应地在它们之间切换。我们使用 DQN 型算法和 UCRL 作为基础算法来实例化我们的算法,并在四种环境中评估我们的算法,包括三个基于真实数据的模拟器:推荐、教育活动排序和 HIV 治疗排序。在所有情况下,CSRL 都能比基线更快地学习到好的策略。
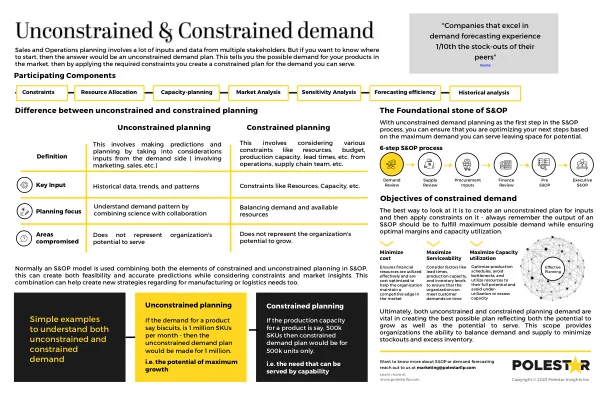
不受约束和受约束的规划
销售和运营规划涉及来自多个利益相关者的大量输入和数据。但是如果你想知道从哪里开始,那么答案就是一个不受约束的需求计划。这会告诉你市场上对你的产品的潜在需求,然后通过应用所需的约束,你可以为你可以满足的需求创建一个受约束的计划。