XiaoMi-AI文件搜索系统
World File Search System绘图

我的树木:树木清查、识别和绘图
● 密封袋 ● 彩色标记胶带、丝带或其他类型的记号笔 ● 旗帜(可选) ● 树图材料(牛皮纸、记号笔、彩色纸、剪刀或任何其他有趣的材料!) ● 带数字的树标签 介绍: 让学生集中精力进行活动,鼓励他们想象在公园、学校或家里的树下是什么感觉。让他们回忆一些在树周围的记忆或与之相关的感受。这节课将探讨这个问题:“我家有多少棵树?有多少种不同类型的树?” 活动:首先,你应该确定你希望学生探索的房子院子或社区的区域。这可以是庭院、后院或社区绿地。如果需要,用旗帜标记他们将要探索的区域。 数树: 让学生开始计算或估计研究区域内的树木数量。如果同时使用计数和估算方法,学生可以将他们的估计值与他们计算的实际数量进行比较。

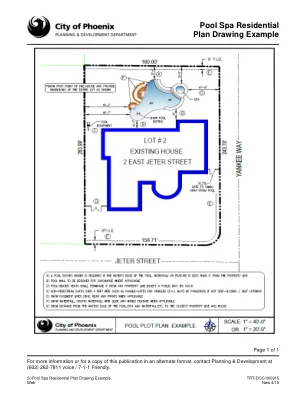
泳池水疗中心住宅平面图绘图示例
第 1 页,共 1 页 如需更多信息或获取本出版物的其他格式副本,请联系规划与开发部,电话:(602) 262-7811 语音电话/7-1-1 友好电话。S:\Pool Spa 住宅平面图示例 TRT/DOC/000915 Web New 4/15
基于空间表征语义层次的机器人探索与绘图策略
许多科学家 [Lynch,1960;Piaget 和 Inhelder,1967;Siegel 和 White,1975] 已经观察到认知地图被组织成连续的层,并提出对大规模环境的有用且有力的描述的核心要素是拓扑描述。分层模型包括从局部感官信息中识别和辨认地标和地点;路线控制知识(从一个地方到另一个地方的过程);连通性、顺序和包含的拓扑模型;以及形状、距离、方向、方位以及局部和全局坐标系的度量描述。看来,认知地图的分层结构是人类在大规模空间中稳健表现的原因。我们的方法试图将这些方法应用于机器人探索和地图学习问题。我们定性方法中对环境的核心描述是拓扑模型,如 TOUR 模型 [Kuipers,1978]。该模型由一组节点和弧组成,其中节点代表环境中可识别的位置,弧代表连接它们的行进路径。节点和弧是根据机器人的感觉运动控制能力程序性定义的。度量信息添加到拓扑模型之上。

2013 年 10 月 15 日 石油泄漏检测和绘图...
最近的研究表明高光谱图像的实用性,尽管目前高光谱数据集的解释需要专业知识。自动化所使用的信息提取过程将使高光谱传感器输出更容易集成到操作中。光学(可见光、多光谱 (MS) 和紫外线 (UV))和热红外 (TIR) 传感器通常用于石油泄漏监测,而静态和视频摄像机的视觉解释仍然是操作监视的重要组成部分。石油可能与其他现象混淆,特别是如果解释不是由受过培训的操作员进行的。有大量的知识描述使用视觉仪器绘制和描述水上石油的情况,但几乎没有经过验证的信息可以描述它们在冰冻条件下的使用。光学系统的弱点是它们依赖于良好的能见度,而在北极条件下能见度有限,而 TIR 则受到的限制较少。

利用钟表绘图测试图像检测认知障碍的人工智能辅助在线工具
a 波士顿大学电气与计算机工程系、系统工程部和生物医学工程系 b 波士顿大学医学院医学系 c 波士顿大学弗雷明汉心脏研究 d 波士顿大学计算与数据科学学院 e 波士顿大学计算机科学系 f 波士顿大学医学院和公共卫生学院解剖学与神经生物学系、神经病学系和流行病学系 g 通讯作者:Ioannis Ch. Paschalidis,yannisp@bu.edu,8 St. Mary's St Boston, MA 02215

使用不同分辨率的数字高程模型进行洪水灾害模拟和绘图
背景与目标:精细地形信息是详细洪水模拟和制图的关键输入参数。本研究旨在比较使用光检测和测距以及干涉合成孔径雷达系统的不同分辨率数字高程数据集开发的洪水模型的精度统计数据。方法:本研究应用地理信息系统中可用的水文工程中心-水文建模系统和水文工程中心-河流分析系统模型来模拟和绘制 Maapag 流域的洪水灾害。使用混淆误差矩阵、f 测量值和均方根误差统计数据测试了模型的有效性和精度。结果:结果表明,使用光检测和测距数据集,模型的精度为 88%、0.61 和 0.41;而使用干涉合成孔径雷达数据集,模型的精度分别为 76%、f 测量值和均方根误差。结论:使用光探测和测距数据集开发的模型比使用干涉合成孔径雷达开发的模型精度更高。然而,考虑到模型实施成本和较小的精度残差,后者可以作为前者的替代方案用于洪水模拟和测绘。因此,洪水建模者,特别是来自地方当局的洪水建模者更喜欢使用较粗的数据集来优化洪水模拟和测绘工作的预算。

关键负荷和水平建模与绘图方法及标准手册以及空气污染影响、风险和趋势手册
本手册是建模和绘制临界水平和负荷及其超标情况以及动态酸化建模的基本指南。它帮助联合国欧洲经济委员会《远距离越境空气污染公约》(CLRTAP)缔约方履行其义务,使用统一的方法获取影响和风险评估数据。这是在国际合作计划(建模和绘制临界负荷和水平以及空气污染影响、风险和趋势)(ICP M&M)框架内进行的。该计划于 1988 年在德国领导下成立;从一开始到 2002 年,Heinz Gregor 一直担任主席,他对临界水平和负荷的发展以及它们在欧洲减排政策中的作用产生了重大影响。
使用不同分辨率的数字高程模型进行洪水灾害模拟和绘图
背景与目标:精细地形信息是详细洪水模拟和制图的关键输入参数。本研究旨在比较使用光检测和测距以及干涉合成孔径雷达系统的不同分辨率数字高程数据集开发的洪水模型的精度统计数据。方法:本研究应用地理信息系统中可用的水文工程中心-水文建模系统和水文工程中心-河流分析系统模型来模拟和绘制 Maapag 流域的洪水灾害。使用混淆误差矩阵、f 测量值和均方根误差统计数据测试了模型的有效性和精度。结果:结果表明,使用光检测和测距数据集,模型的精度为 88%、0.61 和 0.41;而使用干涉合成孔径雷达数据集,模型的精度分别为 76%、f 测量值和均方根误差。结论:使用光探测和测距数据集开发的模型比使用干涉合成孔径雷达开发的模型精度更高。然而,考虑到模型实施成本和较小的精度残差,后者可以作为前者的替代方案用于洪水模拟和测绘。因此,洪水建模者,特别是来自地方当局的洪水建模者更喜欢使用更粗略的数据集来优化洪水模拟和测绘工作的预算。
使用不同分辨率的数字高程模型进行洪水灾害模拟和绘图
背景和目标:精细地形信息是详细洪水模拟和制图的关键输入参数。本研究旨在比较使用不同分辨率的数字高程数据集开发的洪水模型的精度统计数据,这些模型来自光检测和测距以及干涉合成孔径雷达系统。方法:本研究应用地理信息系统中可用的水文工程中心-水文建模系统和水文工程中心-河流分析系统模型来模拟和绘制 Maapag 流域的洪水灾害。使用混淆误差矩阵、f 测量和均方根误差统计测试了模型的有效性和准确性。发现:结果表明,使用光检测和测距数据集,该模型的准确率分别为 88%、0.61 和 0.41;而使用干涉合成孔径雷达数据集,该模型的误差矩阵、f 测量和均方根误差的准确度分别为 76%、0.34、0.53。结论:使用光检测和测距数据集开发的模型比使用干涉合成孔径雷达开发的模型具有更高的准确度。尽管如此,考虑到模型实施成本和较小的精度残差误差,后者可以作为前者的替代方案用于洪水模拟和测绘。因此,洪水建模者,特别是来自地方当局的洪水建模者更喜欢使用更粗的数据集来优化洪水模拟和测绘工作的预算。