XiaoMi-AI文件搜索系统
World File Search System自动机

自动机理论和形式语言的半群
I.引言Semigroups是抽象代数中基本代数结构的基本代数结构,在数学和计算机科学的各个领域都有重要的应用。半群是配备了关联二进制操作的集合,使其成为代数中最简单但最通用的结构之一。半群的重要性不仅限于纯数学,而是扩展到理论计算机科学,尤其是在自动机理论和正式语言中[1,2,3]。Automata理论,理论计算机科学的基础区域,研究摘要机器及其解决的问题。有限的自动机是最简单的计算模型之一,通过句法半群的概念与半群密切相关,这些概念是自动机识别的语言[4,5]。具体来说,有限自动机的状态可以解释为半群的元素,并且状态之间的过渡是由半群操作定义的。自动机和半群之间的这种相互作用为理解计算过程和语言识别提供了一个强大的框架[6,7]。在正规语言的研究中,半群在形式语言理论中的应用尤其明显,这正是有限自动机识别的语言类别。普通语言可以通过正则表达式描述,又可以将其映射到有限的自动机。每种普通语言都有相关的句法半群,这是一个封装

基于自动机的量子电路验证器-AutoQ
最近,量子计算受到了许多技术突破[7]和不断增加的投资的驱动。原型Quantum计算机已经可用。公众,尤其是学生,研究人员和技术爱好者的机会,可以通过云服务(例如Amazon Braket [1]或IBM Quantum [2]来访问Quantum Computing设备迅速增加。由于量子计算的复杂性和概率性质,量子程序中错误的机会远高于传统程序,而常规的正确保证手段(例如测试)在量子世界中的适用性要少得多。量子程序员需要更好的工具来帮助他们编写正确的程序。因此,研究人员预计,正式的验证将在量子软件质量保证中发挥至关重要的作用,并且近年来已经朝着这个方向投入了重要意义[5,11,11,21,41,41 - 43,45,46]。然而,自动化量子程序/电路验证的实用工具仍然缺失。本文介绍了AutoQ 1,这是一种基于[14]中提出的方法的量子电路验证的全自动工具。特别是,AUTOQ检查了Hoare式规范的有效性{pre} c {post},其中c是openQasm格式[17]和

带有自动机器人和公共交通的明确货物
不断增长的城市化,爆炸电子商务,提高客户期望以及减少运输的环境影响的需求要求对上一英里的创新交付。本文探讨了一种新的快速发货模型,该模型将公共交通与自动驾驶机器人(ARS)结合在一起并研究其实时管理。在交付时间短的动态需求到达下,我们提出了一个滚动范围框架,并设计了机器学习增强的列生成(CG)方法,以解决实时AR调度问题。我们使用现实世界传递需求数据的数值实验的结果表明,拟议系统的重要潜力减少了旅行时间,车辆交通,排放和噪声。我们的结果还揭示了基于学习的CG方法的功效,该方法提供了与经典CG方法几乎相同的质量解决方案,其计算努力较少。

参数时间自动机的重写逻辑语义和符号分析
本文介绍了参数时间自动机 (PTA) 的重写逻辑语义,并表明使用 Maude-with-SMT 的符号可达性分析对于 PTA 可达性问题是合理且完整的。然后,我们改进了标准的 Maude-with-SMT 可达性分析,以便当 PTA 的符号状态空间有限时,分析终止。我们展示了如何使用我们的方法合成参数,并将其性能与最先进的 PTA 工具 Imitator 进行比较。实际贡献有两个方面:为 PTA 提供新的分析方法(例如,允许查询中具有更一般的状态属性并支持与用户定义的执行策略相结合的可达性分析,而 Imitator 不支持这些方法),并为实时重写理论开发符号分析方法。

计数奖励自动机:通过奖励功能结构的开发
我们提出计数奖励自动机 - 一个有限的状态机变体,能够建模任何奖励函数可作为正式语言表达的奖励函数。与以前的方法不同,该方法仅限于任务作为普通语言,我们的框架允许由不受限制的革命范围描述的任务。我们证明,配备了这样的抽象机器的代理能够解决一组更大的任务集,而不是使用当前方法。我们表明,增强功率的增加并不是以增加自动机复杂性的成本。提出了一系列学习算法,以利用自动机结构来提高样品效率。我们表明,可以使用大语言模型从自然语言任务描述我们的锻炼中所需的状态机器。经验结果表明,我们的方法在样本效率,自动机复杂性和任务完成方面优于竞争方法。
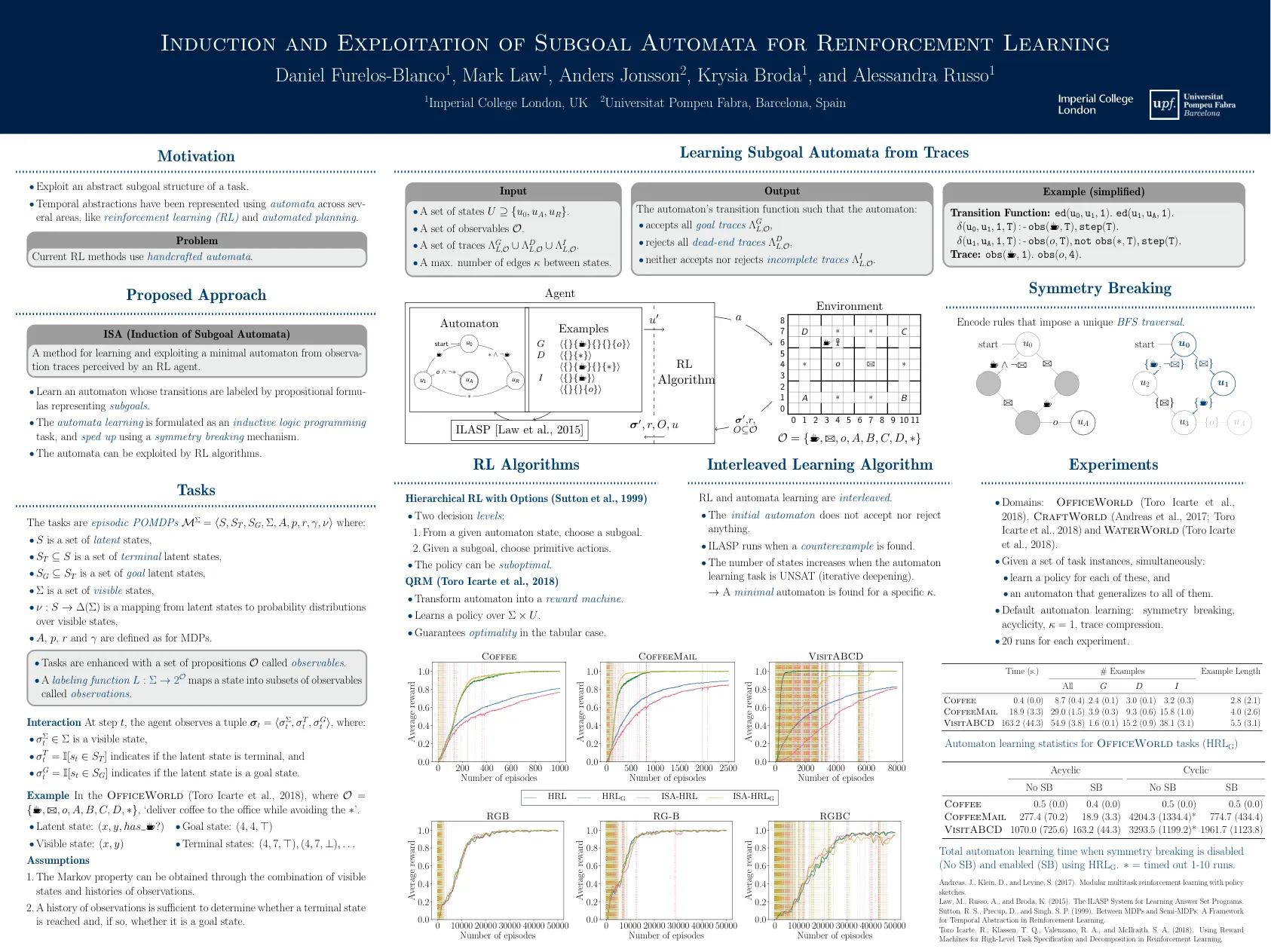
诱导和剥削亚属自动机进行加固学习
Andreas,J。,Klein,D。和Levine,S。(2017)。 模块化多任务增强措施学习政策草图。 Law,M.,Russo,A。和Broda,K。(2015)。 用于学习答案集程序的ILASP系统。 Sutton,R。S.,Precup,D。和Singh,S。P.(1999)。 MDP和半MDP之间:增强学习中时间抽象的框架。 Toro Icarte,R.,Klassen,T。Q.,Valenzano,R。A.和McIlraith,S。A. (2018)。 使用奖励机进行高级任务规范和强化学习中的分解。Andreas,J。,Klein,D。和Levine,S。(2017)。模块化多任务增强措施学习政策草图。Law,M.,Russo,A。和Broda,K。(2015)。 用于学习答案集程序的ILASP系统。 Sutton,R。S.,Precup,D。和Singh,S。P.(1999)。 MDP和半MDP之间:增强学习中时间抽象的框架。 Toro Icarte,R.,Klassen,T。Q.,Valenzano,R。A.和McIlraith,S。A. (2018)。 使用奖励机进行高级任务规范和强化学习中的分解。Law,M.,Russo,A。和Broda,K。(2015)。用于学习答案集程序的ILASP系统。Sutton,R。S.,Precup,D。和Singh,S。P.(1999)。MDP和半MDP之间:增强学习中时间抽象的框架。Toro Icarte,R.,Klassen,T。Q.,Valenzano,R。A.和McIlraith,S。A.(2018)。使用奖励机进行高级任务规范和强化学习中的分解。

硕士论文 - 创建任意经典基本细胞自动机的量子类似物
2 链由局部哈密顿量的总和控制。非可逆经典 CA 的量子类似物被表示为由非厄米哈密顿量控制的非幺正量子系统。介绍并分析了用于控制此类演化的两组可能的非厄米算子。分析所得的量子系统,并将其与选定规则的经典系统进行比较。相似之处包括收敛到相似状态,并在静态和周期性情况下表现出相同的行为。针对选定系统确定并解释了已知的量子现象,如遍历性及其由于希尔伯特空间碎片而导致的破坏,其中与 PXP 模型等经过充分研究的系统进行了比较。
量子点细胞自动机(QCA)中的一种新型单层全加器
而列数是垂直方向上的最大单元数。QCA Designer-E 会估算所有可能的坐标组合的总能量耗散。有各种能量耗散分量,如 E_bath、E_clk、E_io、E_in 和 E_out,用于计算所有坐标的总能量耗散。QCA 单元在时钟周期内会损失能量。该能量耗散显示为 E_bath [13]。需要注意的是,E_in 和 E_out 是 QCA 单元的输入和输出能量耗散,而 E_io 是 E_out 和 E_in 之间的能量耗散差。能量耗散为正值表示能量转移到 E_clk、E_io 和 E_env,其中 E_env 是转移到环境中的能量。能量耗散误差 (E_Error) 计算为 EError = Eenv-

量子点细胞自动机技术中低成本 SRAM 单元的设计
1 马辛德拉大学电气与电子工程系,海得拉巴 500043,印度 2 巴巴古拉姆沙巴德沙大学电子与通信工程系,拉朱里 185234,印度 3 信息与通信技术 (ICT) 大学系,科技与技术 1902,孟加拉国 4 Univ. leå 理工大学电气与计算机工程系,SE 971 87 吕勒奥,瑞典 7 日本理化学研究所先进光子学中心中子束技术团队,RIKEN,Wako 351-0198,日本 * 通讯地址:soha.bhat@outlook.com (SMB); ali.bahar@usask.ca (ANB); akira.otsuki@uai.cl (AO)

超节能可逆量子点细胞自动机 8:1 多路复用器电路
摘要:在设计用于超大规模集成 (VLSI) 系统的数字电路时,降低功耗方面的能效考虑是一个重要问题。量子点细胞自动机 (QCA) 是一种新兴的超低功耗方法,不同于传统的互补金属氧化物半导体 (CMOS) 技术,用于构建数字计算电路。开发完全可逆的 QCA 电路有可能显著降低能量耗散。多路复用器是构建有用数字电路的基本元素。本文介绍了一种具有超低能耗的新型多层完全可逆 QCA 8:1 多路复用器电路。使用 QCADesigner-E 2.2 版工具模拟了所提出的多路复用器的功耗,描述了 QCA 操作背后的微观物理机制。结果表明,所提出的可逆 QCA 8:1 多路复用器的能耗比文献中之前介绍的最节能的 8:1 多路复用器电路低 89%。