XiaoMi-AI文件搜索系统
World File Search System行人

对行人行为预测的承诺和挑战
预测行人行为是确保自动驾驶汽车安全性和可靠性的关键。尽管通过从注释的视频框架序列中学习深入学习方法,但他们通常无法完全掌握行人与交通之间的动态相互作用,但可以进行准确的预测。这些模型也缺乏细微的常识推理。此外,这些模型的数据集的手动注释既昂贵又挑战,以适应新情况。视觉语言模型(VLM)的出现,由于其先进的视觉和因果推理技能,引入了这些问题的有希望的替代方案。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。 我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。 我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。 该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。 定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。 但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。
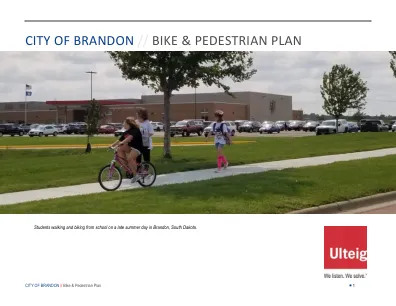
布兰登市 // 自行车和行人规划
指导布兰登市未来 20 年发展的总体规划文件的制定需要规划人员、市政府工作人员和利益相关方顾问团队的周密规划和反复讨论。布兰登市与苏福尔斯大都会规划组织 (MPO)、南达科他州交通部 (SDDOT) 和 Ulteig 合作,投资创建了这份文件——该市第一份自行车和行人总体规划——旨在将主动交通无缝融入城市生活,既是一种实用模式,也是经济和社区发展的催化剂。该计划将提出一个自行车和行人交通网络,以安全、舒适的方式连接城市的各个社区,让各种用户都感到舒适。它将认识到,该网络必须实用且对社区负担得起,并带来远超其成本的经济和健康效益。布兰登市的交通系统将提供步行或骑自行车的选择,使用健康、可持续、经济实惠且社会满意的出行方式。
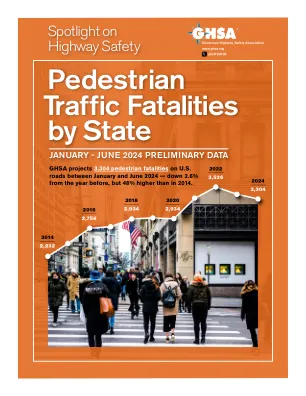
国家交通死亡人行道行人
与前几年一致,在原始数字方面,加利福尼亚,佛罗里达州和德克萨斯州的死亡人数最多。一起,这三个州在2024年上半年占所有行人死亡的三分之一以上(35%)。但是,它们仅占美国人口的28%。这三个倾向于有更温暖的气候(可能会促使更多的人走路)和大型城市中心(导致更多潜在的车辆冲突)这一事实可能有助于解释这一差距。图5说明了这些数据。

NRPM行人头部保护标准
A.概述B.与相关车辆的相关性C.头部组件测试的优势D.头部损伤标准(HIC)E。速度和角度会影响Hood VI的速度和角度。定义受标准A的相关区域A。确定引擎盖顶B.引擎盖区域C.定义儿童头部测试区域和成人头部测试区VII。提出的要求并评估合规性A。必须符合HIC 1000 B的引擎盖区域数量。HIC1700区域的制造商名称C.首先接触D.考虑与必须满足HIC100和HIC1700限制的测试面积有关的考虑。考虑到测试区域的扩展的考虑因素不到Hood面积VIII的数值的三分之二时,考虑到了测试区域的扩展。GTR 9术语和修正案3 A.术语B的比较B。修正案3 IX。头部特征A.一般B.资格限制C.可重复性和可重复性X.其他问题A.主动引擎盖xi。对其他标准XII的影响。提议的交货时间XIII。福利和成本XIV。考虑了替代方案xv。规则制定分析并通知XVI。公众参与
集成强大的自动行人检测系统
16. 摘要 提高行人安全并使道路设施对行人更安全、更友好是佛罗里达州的首要任务和交通目标之一。信号交叉口的行人“步行”信号指示启动以及街区中间人行横道的矩形快速闪光灯 (RRFB) 或高强度激活人行横道 (HAWK) 触发都需要行人按下按钮。然而,40%–50% 的行人不会按按钮。城市交通研究中心 (CUTR) 与佛罗里达州交通部 (FDOT) 密切合作,研究了用于街区中间人行横道的自动行人检测系统,以自动激活 RRFB,以及用于信号交叉口的自动行人检测系统,以自动向交通信号控制器发出行人呼叫。CUTR 研究团队审查了各种自动行人检测系统的功能和性能。本研究选择了三个系统。它们首先在受控条件下以及街区中间和交叉口位置进行测试。三个系统中有一个能够满足所有期望的性能要求。该系统进一步在两个街区中间人行横道和一个信号交叉口部署和评估。评估结果表明,该系统在街区中间位置的整体检测系统准确率为 92%,误检率仅为 2%。该系统能够在信号交叉口以 94% 的时间检测到行人,并以 90% 的时间拨打行人服务电话。本研究项目的一个重要贡献是将自动行人检测系统连接到交通信号控制器,以便在检测到行人时拨打行人服务电话,并在行人过早走出检测区之前取消呼叫。测试表明,该系统能够以 98% 的时间检测到行人的消失,并在行人过早离开检测区时以 97% 的时间取消行人呼叫。这一结果显示了自动检测系统和高级交通信号控制器使用自定义脚本在不需要时管理取消行人呼叫的能力。此功能有助于最大限度地减少不必要的车辆延误。这项研究为应用自动行人检测技术进一步提高信号交叉口和街区中间人行横道的行人安全并减少不必要的车辆延误提供了关键的一步。

巡航行人的教训拖动不幸
摘要。2023年10月的GM Cruise Robotaxi与旧金山的一名行人之间的撞车事故不仅造成了严重伤害,而且在该公司的剧变中也引起了戏剧性的动荡,这可能会在整个行业中产生持久的影响。不仅源于损失事件本身,而且还源于克鲁斯(Cruise)如何处理他们的机器人在最初的碎片后停止后将行人拖到车下的情况。外部调查报告提供了原始的材料,描述了事件并从监管的角度批评公司的回应,但将安全工程建议排除在Scope中。我们通过将不同的外部报告材料的不同部分绑在一起来强调事件之间的特定事实和关系。然后,我们探索可能与之相关的安全课程:识别和响应附近的不幸,建立了一个准确的世界模型,对碰撞后场景的准确模型,在复杂情况下,所谓的“最小风险状况”策略的不足,在贫困的组织中,较差的组织疾病在响应较差的组织中,使较差的侵略性的损害差异和一定差异化的损害差异,并使其成为侵略性的自动化损失,并使其成为一定的损失,并逐渐成为一种越来越严重的损失,并且是一定差异的损失,并且是一定差异的损害。事故导致下游的组织危害更加严重。

随机量子电路采样:行人指南
为什么这一点很重要?为了证明量子霸权,我们最终要证明 Pr(S) 和 Pr(Scl) 之间存在可测量的差异。这是基于这样一个事实:量子电路的状态空间大小是 n 的指数,因此即使对于适中的 n = 50 个量子比特(大约是 Google 实验中使用的数字),状态 |ψ⟩ 也由 250≈1015 个复数描述。因此,在经典计算机上完美模拟量子电路是一个棘手的问题,因此我们假设经典算法具有关于 n 的多项式资源,而不是关于 n 的指数资源。换句话说,从经典计算机获得的样本 Scl 是从实际量子电路的近似值中提取的,当我们增加量子比特的数量时,该近似值不会适当扩展。那么,直观地看,我们可能会认为从经典算法获得的位串与从实际量子电路获得的位串在某种程度上“不同”,因为我们只能粗略地近似电路以获得这些位串。量化这种差异的一个合理方法如下:我们首先问,“如果我对电路的输出状态 | ψ ⟩ 有一个完美的表示,那么我获得样本 S cl 的可能性有多大?”这个概率可以通过计算 | x cl ⟩ 和 | ψ ⟩ 的内积来找到,其中 | ψ ⟩ 表示“完美”的输出状态(即,从完美、无错误的量子计算机的实验实现中获得的输出状态)。然后,我们可以将 Pr(S cl) 与获得量子计算机 Pr(S) 生成的集合 S 的概率进行比较。如果我们为经典算法提供更多资源和/或增加量子电路中的错误率(因此我们的输出状态 | ψ ⟩ 不是“完美”),我们应该看到这些概率相互收敛,因此 Pr( S ) ≈ Pr( S cl )。
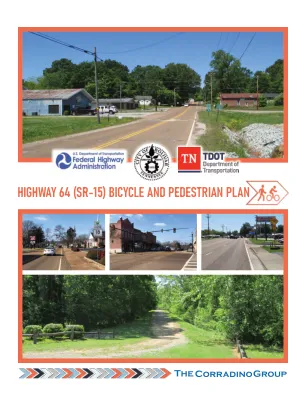
高速公路64(SR-15)自行车和行人计划
I.介绍和概述自行车和行人计划是为了为所有用户创建舒适的设施而创建的,以增加步行和骑自行车的旅行。该网络旨在服务于许多旅行目的,包括工作,学校或零售区域,并将为娱乐和锻炼目的提供好的机会。为步行者和骑自行车的人提供安全,连接的设施,鼓励社区中的人们用步行和骑自行车代替车辆旅行,并鼓励运动,这将改善社区的健康。为了鼓励步行和骑自行车旅行,玻利瓦尔市希望为64号高速公路(第15号州际公路)的所有级别用户提供设施。64号公路将城市东侧的沙公园海滩连接到西侧的宜人的Run Creek。两个公园都提供步行和骑自行车的机会,并将作为起源和目的地。了解,大多数步行和骑自行车旅行的步行不到半英里,骑自行车的3英里不到3英里,在64号高速公路上提供设施将是增加市区和公园之间步行和骑自行车旅行的机会。

基于优化的联网自动车辆和行人的交叉控制
目前使用交通信号进行协调的较大或更繁忙的城市交叉点的抽象流量,以防止危险的交通情况并规范交通流量。在将来有100%连接的自动化车辆的情况下,可以更换常规的交通信号,并且交叉路口的车辆可以通过车辆到车辆和车辆到基础设施通信无缝协调。在过去的二十年中,已经提出了许多这样的控制策略,通常称为自主交叉路口管理(AIM)。近年来,可以观察到更简单的首先发展,首先可以观察到基于优化的目标策略。与基于插槽的策略和常规交通信号控制(TSC)相比,基于优化的目标可以显着提高容量并减少延迟。此外,它允许优先考虑道路用户。本文是第一个以优化目标考虑行人的人之一。所提出的方法由无信号的车辆控制组成,结合了完全集成到优化问题中的行人信号相。由于控制器的通信范围在现实世界应用中受到限制,因此详细介绍并详细说明了滚动范围方案。使用微观交通模拟框架实施和评估了呈现的策略。结果表明,与完全驱动的TSC相比,车辆延迟可以大大减少,车辆容量可以增加,而行人等待时间则是可比的。此外,将重点放在在介绍的设置中如何平衡车辆和行人延迟。可以调整三个不同的控制参数,需要根据所考虑的需求方案对其进行调整。