XiaoMi-AI文件搜索系统
World File Search System行星探索

机器人团队行星探索
自太空探索开始以来,火星和月球一直被轨道器、着陆器和探测车所探索。超过四十个任务瞄准火星,一百多个任务瞄准月球。开发用于探索天体的新型策略和技术仍然是航天机构的重点。多机器人系统对于行星探索尤其有前景,因为它们对单个故障更具鲁棒性,并且有可能探索更大的区域;但是,操作员可以单独控制的机器人数量是有限的。我们最近参加了欧洲航天局在西班牙兰萨罗特岛的月球/火星模拟站举行的跨学科设备测试活动 (PANGAEA-X)。我们使用了一群无人机 (UAV) 来研究系统操作和人为因素的相互作用。人类操作员通过自组织网络和数据共享协议指挥群体在两种控制模式下探索未知区域:一种是操作员分别指示每个机器人;另一种是操作员为群体提供一般指导,群体通过分布式决策和共识建立相结合的方式进行自组织。我们通过瞳孔测量评估每种情况下的认知负荷,并通过自我报告评估感知到的任务需求和直觉性。我们的结果表明,通过群体智能实现更高的自主性可以减少工作量,让操作员有时间执行其他任务,例如监督策略和沟通。未来的工作将进一步利用群体智能的进步进行探索任务。
行星探索科学技术办公室更新
• 在 PSD、ESSIO 和 SMD 内以及与 STMD 和 ESDMD 合作 • 与科学技术界进行推广和合作 • 具有行星科学特定需求、技术机会、新颖/高影响力的全面投资组合
科学教育中的行星探索
为了回答这些大问题,我们已派出机器人任务去探索我们的太阳系和我们自己以外的行星系统。NASA 最近的飞行任务包括 2015 年新视野号飞越冥王星、黎明号任务探索矮行星谷神星和小行星灶神星,以及 MAVEN 正在进行的火星大气和气候调查。持续飞行的任务包括几个火星轨道器以及探索火星地质历史的好奇号和机遇号探测器。开普勒任务创造了有关围绕其他恒星运行的行星的宝贵数据,这些数据仍在被挖掘。其他国家已派出机器人任务前往月球、金星和火星,并正在计划这些任务。2016 年,NASA 的朱诺号任务将抵达木星,对木星进行研究

行星探索科学技术办公室(PESTO)的最新消息
• 天王星大气全耦合大气环流模型的进展 - 动力学和玩具模型,Jonathan H. Jiang (JPL) • 需要在 -90 °C 至 -30 °C 范围内测试冰融化探测器?,Paula do Vale Pereira (中佛罗里达大学) • 中红外快速先进光学生命探测探测器 (MIRACLE),Yamuna Phal (科罗拉多矿业学院) • 用于行星原位光谱的微型、多功能、微观有机/无机成分分析探测器 (MOCAPS),Mool Gupta (弗吉尼亚大学) • 使用低电容固态纳米孔探测海洋世界的生命,Vanya Buvac (Goeppert LLC) • 用于增强行星保护和污染控制的激活雾系统,Gregory Fridman (AAPlasma LLC) • BOREAS - 通过模拟探测木卫二的地下海洋冰冷的表面条件,Ilankuzhali Elavarasan(德克萨斯大学里奥格兰德河谷分校)• 用于高灵敏度宽带热检测的多孔硅基热电堆,Sabah Bux(JPL)• 用于检测未来潜在海洋世界任务的有机生物特征的 SCHAN 仪器,Victor Abrahamsson(JPL)• 即将到来的天王星恒星掩星活动和影子追逐者任务概念,Kunio Sayanagi(LARC)• SLUSH:进入海洋世界的冰钻探测器,Nicklaus Traeden(Honeybee Robotics)• 海洋世界和 Wolstenholme 峡湾冰下平台的样本选择和处理(SSHOW UP),Frances Bryson(康奈尔大学)• 用于导航木卫二的垂直进入机器人(VERNE),Frances Bryson(康奈尔大学)

Helicat-darts:一个高保真,闭环旋翼飞行器模拟器,用于行星探索
旋翼飞机为探索外星环境提供了独特的功能。与诸如漫游者之类的勘探工具相比,旋翼船能够越来越快地到达感兴趣的目的地。此外,它们只需要合适的起飞和降落区,并且可以飞越由于障碍物或粗糙地形而可能无法遍历流浪者可能无法穿越的地形。这些优势激发了火星的创造任务,该任务涉及第一个飞行火星的旋翼飞机[1]。这项任务的成功继续激励未来的任务,例如可能使用直升机来返回火星样本[2]。设计一种在火星氛围环境中运行的首个旋翼飞机,需要进行设计,开发和操作的独特工具。在开发的工具中是Helicat-darts(简单地称为简洁的Helicat),用于旋转动力学建模和仿真。此仿真工具是指导,导航和控制(GNC)算法和软件开发的测试床,并作为分析飞行性能和动态的工具。Helicat在Ingenuity任务的整个生命周期中都使用,包括以下内容:

利用亚轨道飞行测试推动行星探索科学技术发展 EW DiVito 1 , C. Tuck 1 , GH Peters 1 , DM McC
简介:亚轨道飞行测试是一种非常宝贵但经常被忽视的工具,可用于更快地推进太空研究和技术开发。美国宇航局的飞行机会计划利用商业飞行提供商,使用亚轨道火箭动力飞行器、飞行抛物线轨迹的飞机、高空气球和托管轨道有效载荷平台来加速太空技术的成熟。接触相关的太空环境可以以经济高效且及时的方式验证技术的功能,从而降低更长、更昂贵的任务(包括月球和火星任务)的风险。自 2011 年以来,飞行机会计划已促成超过 260 次飞行,进行了超过 870 次有效载荷测试。飞行机会团队的演讲者将重点介绍这些飞行测试如何支持技术和研究的成熟,并应用于月球和行星探索。
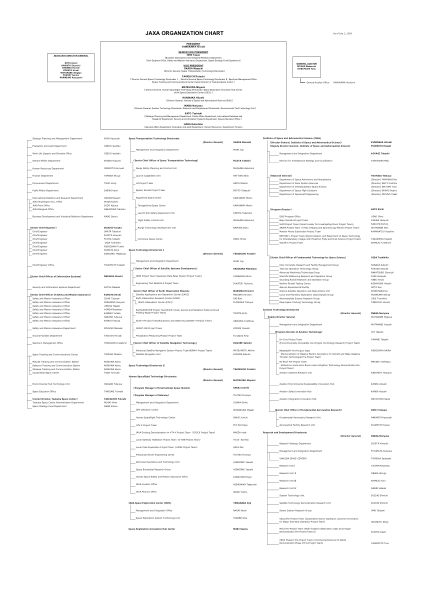
JAXA 组织结构图
〔安全与任务保障高级首席官〕 KOHATA Hiroki 卫星应用和操作中心 (SAOC) MAEJIMA Hironori 月球和行星探索数据分析组 MURAKAMI Shinya