机构名称:
¥ 1.0
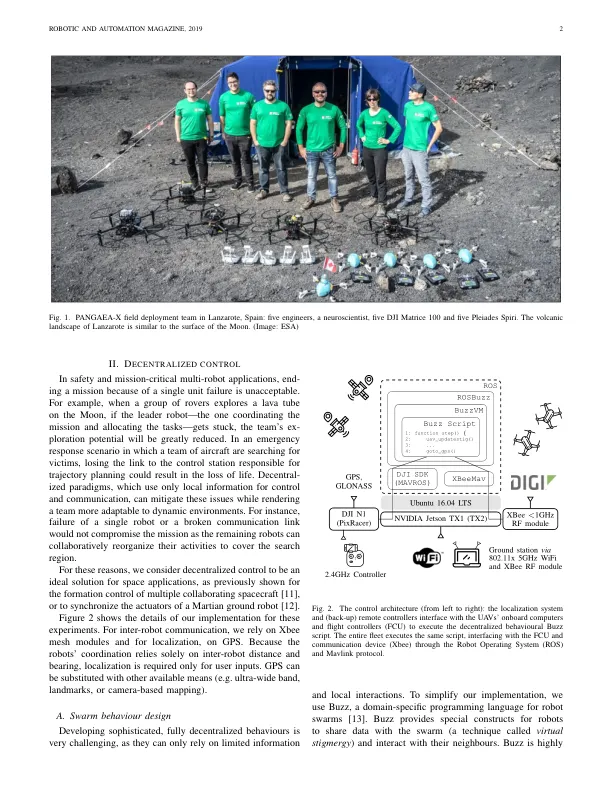
自太空探索开始以来,火星和月球一直被轨道器、着陆器和探测车所探索。超过四十个任务瞄准火星,一百多个任务瞄准月球。开发用于探索天体的新型策略和技术仍然是航天机构的重点。多机器人系统对于行星探索尤其有前景,因为它们对单个故障更具鲁棒性,并且有可能探索更大的区域;但是,操作员可以单独控制的机器人数量是有限的。我们最近参加了欧洲航天局在西班牙兰萨罗特岛的月球/火星模拟站举行的跨学科设备测试活动 (PANGAEA-X)。我们使用了一群无人机 (UAV) 来研究系统操作和人为因素的相互作用。人类操作员通过自组织网络和数据共享协议指挥群体在两种控制模式下探索未知区域:一种是操作员分别指示每个机器人;另一种是操作员为群体提供一般指导,群体通过分布式决策和共识建立相结合的方式进行自组织。我们通过瞳孔测量评估每种情况下的认知负荷,并通过自我报告评估感知到的任务需求和直觉性。我们的结果表明,通过群体智能实现更高的自主性可以减少工作量,让操作员有时间执行其他任务,例如监督策略和沟通。未来的工作将进一步利用群体智能的进步进行探索任务。
机器人团队行星探索
主要关键词




相关文件推荐