XiaoMi-AI文件搜索系统
World File Search System装配

范德华异质结构的超干净装配
图1:VDW异质结构的无机组装。(a)几个从硅芯片伸出的悬臂的SEM显微照片。(b)示意图和(c)横截面高角环形暗场(HAADF)扫描透射电子显微镜(STEM)图像,显示了悬臂的多层金属涂层,可容纳2DM标本(样品中显示了多层MOS 2晶体中的样品)。(d)使用能量色散X射线光谱法在(c)中显示的区域的元素映射。(E)涂层过程后悬臂表面的AFM显微照片。均方根粗糙度值(r rms)在图像e上指示。 (F-H)采用的步骤将HBN晶体拾起到制造的悬臂上:(f)对齐,(g)接触和(h)升降。sem(l)和悬臂的光学(M)显微照片,拾取了厚(约40 nm)HBN晶体后。(i,j)拾取石墨烯晶体的步骤:对齐(I),接触和升降(J)。(n)光学显微照片显示了SIO 2上与石墨烯接触的悬臂(用虚线突出显示)。悬臂的灵活性可以准确控制层压过程。(k)石墨烯/HBN堆栈沉积在底部HBN晶体上。在整个底部HBN晶体被悬臂覆盖以选择性释放堆栈而不是将其捡起之前,层压过程要停止。(O)光学显微照片显示了氧化硅晶片上产生的异质结构,显示了较大的均匀区域。可以在补充第2节中找到有关其他样本的更多数据。

空间服务、装配和制造 (ISAM) 解决方案
对接机制 Moog 线性执行器系统 (LAS) 是 NASA 对接系统 (NDS) 内的主要子系统。它为对接国际空间站和最终对接 Gateway 提供多轴独立机电负载控制。带和不带脐带(电气和流体)的半 ESPA 对接系统投资正在进行中。
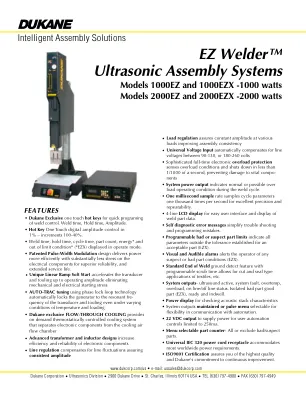
EZ Welder™ 超声波装配系统 - Dukane
• 系统功率输出指示焊接周期内正常或可能的过载操作条件。• 一毫秒采样率每秒对周期参数进行一千次采样,以获得出色的精度和可重复性。• 4 行 LCD 显示屏,方便用户使用并显示焊接部件数据。• 自我诊断错误消息简化了故障排除和编程错误。• 可编程的不良或可疑部件限值指示所有超出可接受部件公差范围的参数(EZX)。• 视觉和声音警报提醒操作员任何可疑或不良部件状况(EZX)。• 具有可编程擦洗时间的标准焊接结束接地检测功能允许对纺织品等进行切割和密封。• 系统输出 - 超声波激活、系统故障、过热、过载、在线/离线状态。隔离坏部分好部分 (EZX),准备就绪并留置。
人类 - 装配任务的机器人技能转移
为机器人提供类似人类的物体操纵技能,对于改善制造自动化中的整体机器人性能至关重要。尽管大型制造公司的几乎每项任务都是自动化,复杂且非常灵巧的任务,例如约95%的汽车制造中的装配线流程仍是手工完成的。机器人可以通过反复试验学习和获取技能,但在没有指导的情况下掌握新技能是耗时和要求的。但是,由于人类和机器人之间固有的结构差异,从专家技术人员的明确示威中学习可能会面临挑战。

空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等。充分利用空间机器人自主装配空间结构是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了总结。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,总结了空间机器人装配方法。从控制角度综述了如何解决在轨装配的振动抑制与柔顺装配问题,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间装配场景,本文介绍了地面验证试验的发展情况,为空间在轨装配技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中的一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨装配未来的研究方向。

大型 CFRP 结构的柔性自动装配系统
本出版物将介绍一种用于大型 CFRP 结构的柔性自动装配系统的方法。该方法将装配系统分为两个主要组件,即自动连接过程和柔性自动固定装置。将特别关注固定装置、其组件和自动化流程,以实现要组装的 CFRP 结构的最佳 6D 位置和形状。首先,将简要概述最先进的装配系统,然后描述该方法和为柔性自动固定装置开发的通用原型。该原型将作为未来的解决方案呈现,与传统的特定于零件的系统相比,它为自适应装配优化开辟了新的可能性。此外,应用于通用原型的主要自动化流程将作为独立技术呈现,它们作为一个智能系统协同工作。需要描述的自动化流程包括机器测量、接触点调整、6D 位置调整和形状调整。

带交叉参考的商业电池装配指南
根据澳大利亚消费者法律,您有权替换或退款重大失败,或者如果货物无法接受质量,并且失败并不等于重大失败。如果发现电池在指定的原子电池期间在材料或做工(不仅是放电或平坦)上有缺陷,将提供替换电池。
空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等,充分利用空间机器人实现空间结构自主装配是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了综述。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,综述了空间机器人装配方法。从控制角度,综述了如何解决在轨装配的振动抑制和柔顺装配,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间组装场景,本文介绍了地面验证试验的发展情况,为空间在轨组装技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨组装未来的研究方向。
空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等,充分利用空间机器人实现空间结构自主装配是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了综述。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,综述了空间机器人装配方法。从控制角度,综述了如何解决在轨装配的振动抑制和柔顺装配,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间组装场景,本文介绍了地面验证试验的发展情况,为空间在轨组装技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨组装未来的研究方向。
大型 CFRP 结构的柔性自动化装配系统
本出版物将介绍一种用于大型 CFRP 结构的柔性自动装配系统的方法。该方法将装配系统分为两个主要组件,即自动连接过程和柔性自动固定装置。将特别关注固定装置、其组件和自动化流程,以实现要组装的 CFRP 结构的最佳 6D 位置和形状。首先,将简要概述最先进的装配系统,然后描述该方法和为柔性自动固定装置开发的通用原型。该原型将作为未来的解决方案呈现,与传统的特定于零件的系统相比,它为自适应装配优化开辟了新的可能性。此外,应用于通用原型的主要自动化流程将作为独立技术呈现,它们作为一个智能系统协同工作。需要描述的自动化流程包括机器测量、接触点调整、6D 位置调整和形状调整。