
机构名称:
¥ 1.0
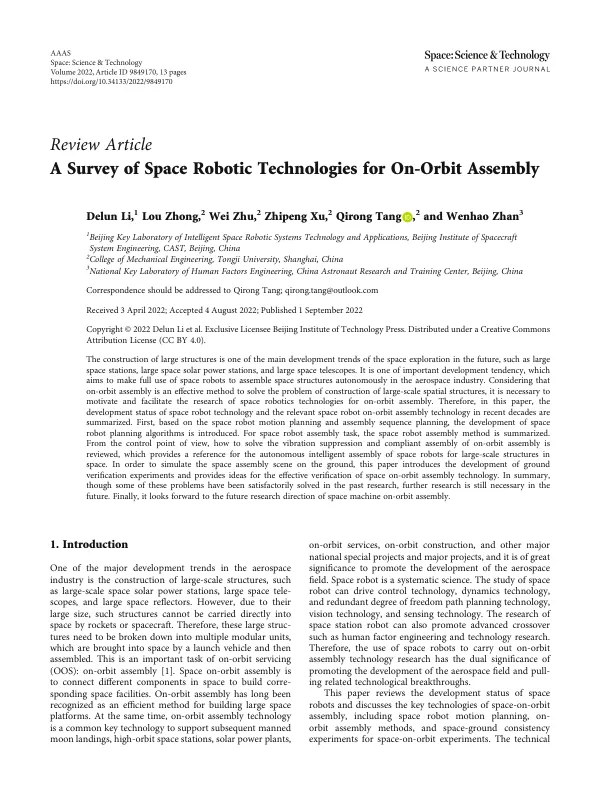
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等。充分利用空间机器人自主装配空间结构是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了总结。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,总结了空间机器人装配方法。从控制角度综述了如何解决在轨装配的振动抑制与柔顺装配问题,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间装配场景,本文介绍了地面验证试验的发展情况,为空间在轨装配技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中的一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨装配未来的研究方向。
空间机器人在轨装配技术综述
主要关键词



相关文件推荐

























