XiaoMi-AI文件搜索系统
World File Search System视觉感知
什么是人工智能(AI)?
人工智能(也称为 AI)的定义是计算机或机器人执行人类通常执行的任务的能力。AI 的含义还可以包括开发执行智力过程的计算机系统。换句话说,机器可以智能地执行任务,例如推理和概括。狭义人工智能是一种专注于特定任务的人工智能。一个例子是具有针对性能力的虚拟助手,例如回答问题的能力。强人工智能是具有人类认知能力的机器智能,例如做出判断、寻找解决方案或交流的能力。今天,了解人工智能系统的常用用途非常重要,包括视觉感知、语音识别和决策。

肢体明显运动感知
肢体明显的运动感知(灯)是指一个移动肢体的虚幻视觉感知,观察两张迅速交替的照片,描绘了两个不同的姿势。快速刺激发作异步(SOA)诱导了对物理上不可能运动的视觉引导感。缓慢的肥皂会引起对身体可能运动的感知。根据灯的运动理论,后者的感知取决于观察者的感觉运动表示。在这里,我们通过在两个灯泡任务期间对人体的感觉rimotor态进行中央(研究1)和外围(研究2)操纵进行了中央(研究1)和外周(研究2)操纵。在受试者设计的研究之间的第一个假基因控制的经颅直流刺激中,我们观察到,通过阴极刺激偏置偏置的灯光降低了左感觉运动皮层活性的降低,朝着对慢速SOAS刺激对的物理上不可能运动的视觉感知感知。在第二个在线内部主体内设计的研究中,我们两次测试了三个参与者小组:(1)具有后肢截肢的人,无论是穿着还是不佩戴假体(2)患有身体正直dysphoria的人(即,渴望在健康的腿部置于正常的位置或绑定的脚上的截肢或绑定的不满意的腿(愿意截肢)(渴望),或者是模仿的腿部(供不应求的腿); (3)坐在正常位置或坐在他们的腿上时,身体健全的人。我们发现,有截肢和健壮的参与者的个体的瞬时感觉运动状态对灯的影响至关重要,但在投标个体中却没有。总的来说,这两项研究的结果证实了灯的运动理论。
第一单元 HCI 基础 人类:I/O 通道 – ...
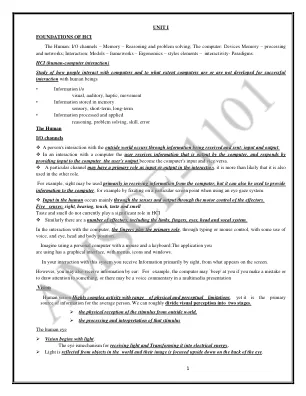
对光高度敏感,因此我们可以在低照度下看东西。 它无法分辨精细的细节,并且容易受到光饱和的影响。 这就是我们从黑暗的房间走到阳光下时会暂时失明的原因:视杆细胞一直处于活跃状态,并被突然的光线饱和。 视锥细胞 视锥细胞是眼睛的第二种受体。 它们对光的敏感度不如视杆细胞,因此可以忍受更多的光线。 视锥细胞有三种,每种对不同波长的光敏感。 这使我们能够看到彩色图像。眼睛有大约 600 万个视锥细胞,主要集中在视网膜中央凹。 中央凹是视网膜的一小部分,图像可在此固定。 盲点 盲点也位于视网膜上。 尽管视网膜主要被光感受器覆盖,但在视神经进入眼睛的地方有一个盲点。 盲点没有视杆细胞或视锥细胞,但我们的视觉系统会对此进行补偿,所以在正常情况下我们无法意识到它。 神经细胞 视网膜还有专门的神经细胞,称为神经节细胞。 有两种类型: X 细胞:这些细胞集中在中央凹,负责早期检测模式。 Y 细胞:这些细胞在视网膜中分布更广泛,负责早期检测运动。 视觉感知 了解眼睛的基本构造有助于解释视觉的物理机制,但视觉感知不止于此。 视觉器官接收到的信息必须经过过滤并传递给处理元素,以便我们识别连贯的场景,消除相对距离歧义并区分颜色。 让我们看看我们如何感知大小和深度、亮度和颜色,它们对于有效的视觉界面的设计都至关重要。

EEG-IMAGENET
探索大脑活动如何转化为视觉感知,为生物视觉系统的世界代表提供了宝贵的视觉感。最近使用功能性磁共振成像(fMRI)或磁脑摄影(MEG)获得的大脑信号实现了有效的图像分类和高质量的重构。但是,这些技术的成本和批量妨碍了它们的实际应用。相比之下,电子摄影(EEG)提出了诸如易用性,可负担性,高时间分辨率和非侵入性操作等优点,但由于缺乏全面的数据集,在相关研究中仍未充分利用。为了填补这一空白,我们介绍了EEG-IMAGENET,这是一个新颖的EEG数据集,其中包含来自16名参与者的录音,这些录音是暴露于Imagenet数据集中的4000张图像。与现有基准相比,此数据集提供的五倍对脑电图对数的数量是五倍。eeg-imagenet包括带有不同水平的粒度标记的图像刺激,包含40张带有粗标签的图像和40个带有精美标签的图像。我们基于此数据集建立了对象分类和图像重建的基准。使用几种常用模型的实验表明,表现最佳的模型可以通过约60%的准确性实现对象分类,并具有三向识别的图像重建约为64%。这些发现突出了数据集增强基于EEG的Vi-Sual Brain-Computer界面的潜力,加深了我们对生物系统中视觉感知的理解,并提出了有望改善机器视觉模型的有希望的应用。
通过基因组编辑实现高产不褐变茄子
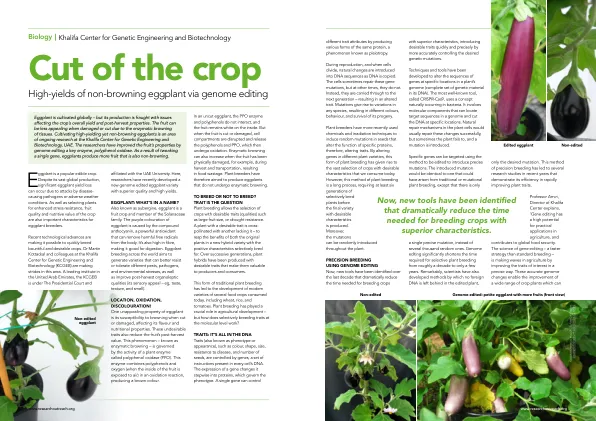
褐变会损坏水果和蔬菜并造成食物浪费。不褐变则保留了水果和蔬菜的感官营养特征和食品品质。我们的研究有可能提高作物的市场价值,因为不褐变会增强人们的视觉感知和食欲,使作物更容易被消费者接受。切片后不褐变可锁住其风味和营养价值。产量增加(超过对照的 10%)有助于提高茄子的总产量。开发具有理想特性的基因组编辑作物主要通过提高产量、提供安全食品和减少食物浪费来促进粮食安全。
地方计划 E 部分:年度服务计划
职业治疗:职业治疗 (OT) 包括旨在提高学生学习成绩、姿势稳定性、自助能力、感官处理和组织、环境适应和辅助设备使用、运动规划和协调、视觉感知和整合、社交和游戏能力以及精细运动能力的服务。直接和间接服务可在课堂、其他教育环境或家庭中以团体或个人形式提供,可能包括培养能力的治疗技术、适应学生的环境或课程以及与其他员工和家长的咨询和合作。服务由在美国职业治疗认证委员会注册的合格职业治疗师根据 IEP 提供。
NTU-EDB-IPP 项目(1-20).xlsx
该项目致力于研究虚拟现实 (VR) 中模拟的室内/室外环境,以及它如何影响与相应现实条件相似的近视发展。VR 如何影响视觉感知,这种影响对近视者和正视者有何不同?最初为成年人设计的 VR 护目镜如何影响儿童的视力?该项目通过对儿童和青少年群体进行 VR 实验来调查这些研究问题。受试者将被要求在 VR 模拟的室内和室外环境中执行任务,同时在任务之前、期间和之后进行各种测量。测量包括但不限于轴长、脉络膜厚度、调节和会聚相关参数、眼球运动、记忆任务、视觉疲劳等。

地形数据中的建筑模式识别 - GDMC
摘要 建筑物模式是地图综合过程中应保留的重要特征。然而,这些模式无法被自动系统明确访问。本文提出了一个框架和几种算法,用于自动从地形数据中识别建筑物模式,重点是共线和曲线对齐。针对这两种模式,开发了两种算法,能够识别中心对齐和边对齐模式。所提出的方法整合了计算几何、图论概念和视觉感知理论的各个方面。虽然共线和曲线模式的单个算法对每种类型的模式都显示出巨大的潜力,但识别出的模式既不完整,也不够好