点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
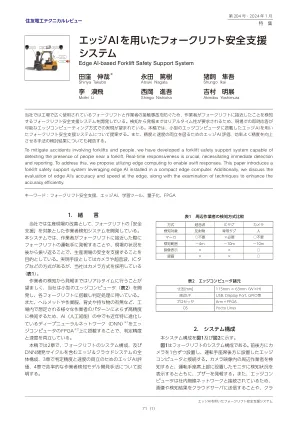
本文回顾了基于视觉的自动驾驶汽车导航方法,重点是应对意外危害。主要着重于开发DNN导航系统,以处理AVS来处理意外的道路危害,并依赖于基于视觉的传感器进行导航。建议的稳健系统采用了与识别和响应机制有关的视觉感知和危害检测的实时算法。它确定了使用动态环境中的视觉信息检测和响应突然危害的挑战。通过实验验证,作者展示了系统如何在复杂和不确定的情况下支持安全和适应性的自动驾驶性能。仅根据视觉数据导航不可预测的危害时,就会注意到差距不足。[6]
主要关键词