XiaoMi-AI文件搜索系统
World File Search System视觉

通过控制视觉刺激的时间,使用脑电图进行字符输入......
研究成果概要(中文):在本研究中,我们旨在开发一种使用 P300 和稳态视觉诱发电位 (SSVEP) 的混合型输入系统,这两种技术在利用脑电图进行字符输入时被广泛使用。该系统发挥了 P300 和 SSVEP 的优势,并弥补了彼此的不足。首先,我们通过视觉刺激呈现建立了一种同时生成方法。接下来,利用呈现方法,我们确认可以通过控制候选字符的呈现时间来有效分离两种不同的脑电图。我们已经证明,我们的原创方法可以实现高速输入。然而,差异程度因对象而异。这是未来需要解决的一个挑战。
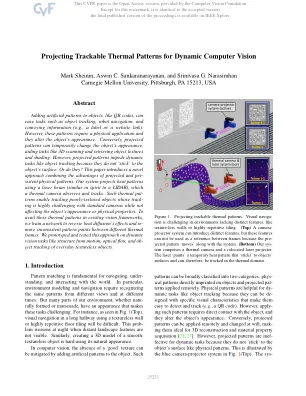
投影动态计算机视觉的可跟踪热图案
将人造模式添加到QR码之类的对象中可以简化诸如对象跟踪,机器人导航和传达信息(例如标签或网站链接)之类的任务。但是,这些模式需要物理应用,它们会改变对象的外观。相反,投影模式可以暂时更改对象的外观,协助3D扫描和检索对象纹理和阴影等任务。但是,投影模式会阻碍动态任务,例如对象跟踪,因为它们不会“粘在对象的表面上”。还是他们?本文介绍了一种新颖的方法,结合了预测和持久的物理模式的优势。我们的系统使用激光束(精神类似于激光雷达)进行热模式,热摄像机观察和轨道。这种热功能可以追踪纹理不佳的物体,其跟踪对标准摄像机的跟踪极具挑战性,同时不影响对象的外观或物理特性。为了在现有视觉框架中使用这些热模式,我们训练网络以逆转热扩散的效果,并在不同的热框架之间移动不一致的模式点。我们在动态视觉任务上进行了原型并测试了这种方法,例如运动,光流和观察无纹理的无纹理对象的结构。

基于事件流的视觉对象跟踪-CVF打开访问
以生物风格的活动相机跟踪近年来引起了人们的兴趣。现有的作品要么利用对齐的RGB和事件数据进行准确跟踪,要么直接学习基于事件的跟踪器。前者会产生较高的推理成本,而后者可能容易受到嘈杂事件或稀疏空间分辨率的影响。在本文中,我们提出了一个新型的分层知识蒸馏框架,该框架可以在培训期间完全利用多模式 /多视图信息,以促进知识转移,使我们能够仅使用事件信号来实现测试过程中高速和低潜伏期视觉跟踪。特别是,基于教师变压器的多模态跟踪框架首先是通过同时喂食RGB框架和事件流来训练的。然后,我们设计了一种新的分层知识蒸馏策略,其中包括成对相似性,功能表示和基于响应地图的知识蒸馏,以指导学生变形金刚网络的学习。在术语中,由于现有的基于事件的跟踪数据集都是低分辨率(346×260),因此我们提出了名为EventVot的第一个大规模高分辨率(1280×720)数据集。它包含1141个视频,并涵盖了许多类别,例如行人,车辆,无人机,乒乓球等。对低分辨率(Fe240Hz,Vi-Sevent,Coesot)和我们新提出的高分辨率EventVot数据集的进行了实验进行了实验

从视觉识别地形物理参数
摘要 - 识别周围环境的物理特性对于机器人的运动和导航对于处理非几何危害(例如湿滑和可变形地形)至关重要。机器人在接触之前预测这些极端的物理特性将是很大的好处。但是,从视力中估算环境物理参数仍然是一个开放的挑战。动物可以利用他们先前的经验以及对自己所看到的东西和感受的了解来实现这一目标。在这项工作中,我们为基于视觉的环境参数估计提出了一个跨模式的自我监督学习框架,这为未来的物理范围内的运动和导航铺平了道路。我们弥合了在模拟中训练和识别视力的物理地形参数的现有政策之间的差距。我们建议在模拟中训练物理解码器,以预测多模式输入的摩擦和刚度。训练有素的网络允许以自我监督的方式将现实世界图像标记,以在部署过程中进一步训练视觉网络,这可以密集地预测图像数据的摩擦和僵硬。我们使用四倍的Anymal机器人在模拟和现实世界中验证物理解码器,表现优于现有基线方法。我们表明,我们的视觉网络可以预测室内和室外实验中的物理特性,同时允许快速适应新环境。- 项目页面https://bit.ly/3xo5aa8 -

评估对象对象的基于视觉模型的弹性...
摘要。鉴于对最近的基于视觉模型的大规模多模式培训及其概括能力,因此了解其鲁棒性的程度对于他们的现实世界部署至关重要。在这项工作中,我们的目标是评估当前基于视觉模型的弹性,以应对不同的对象到后环上下文变化。大多数鲁棒性评估方法都引入了合成数据集,以引起对物体特征(观点,比例,颜色)的变化或实际图像上使用的图像转换技术(对抗性变化,常见的损坏),以模拟分离中的变化。最近的作品探索了利用大型语言模式和di!使用模型来产生背景变化。但是,这些方法要么缺乏对要进行的更改或扭曲对象语义的控制,从而使它们不适合任务。另一方面,我们的方法可以诱导各种对象兼容地面变化,同时保留对象的原始语义和对象的真实性。为了实现这一目标,我们利用文本对图像,图像到文本和图像对段的生成能力自动生成广泛的对象到背景的变化。我们通过修改文本提示或优化文本模型的潜伏期和Textual嵌入来引起自然和对抗背景的变化。这使我们能够量化背景上下文在理解深神经网络的鲁棒性和一般性中的作用。我们生产了各种版本的标准视觉数据集(Imagenet,Coco),将多样的和相同的背景纳入图像中,或在背景中引入颜色,纹理和对抗性变化。我们进行了彻底的实验,并对基于视觉模型的鲁棒性与对象之间的背景环境之间的鲁棒性进行了深入的分析。我们的代码和评估基准将在https://github.com/muhammad-huzaifaa/ObjectCompose上找到。

在Knauf革命性的质量检查与视觉AI
knauf绝缘材料进行了数字化转换,以使用AI驱动的解决方案来增强其质量检查过程。,他们面临着耗时且容易出现人为错误的手动检查过程的挑战。一项试点计划测试了视觉AI系统,该系统后来成功部署了生产线,从而产生了更高质量的产品,并通过自动化提高了效率。持续的评估和迭代对于将系统提炼和改进为成功的解决方案至关重要,从而降低成本并提高客户满意度。
经纱视觉-Kerem Yildirir
LIDAR和SLAM为我们提供了一个离线的全球地图,但是我们需要检测动态障碍,最重要的是行人,以及在录制全球地图时不存在的汽车,骑自行车的人和其他物体。基于Intel Realsense和Livox 100中激光雷达的实时图像,我们需要确定3D中障碍物的位置和类别。

M.Sc. (化学)计划 BS化学 Annexure A提出的硕士课程提纲应用心理学第I&II部分(年度系统)的附属学院 B. GE-161-信息与通信简介... 带有代码的主题的课程内容:bot 课程标题:植物学-III(细胞生物学,进化和遗传学) BOT-206 Cr。 3(2+1)细胞生物学,遗传学和... 会费 /费用时间表(PU学生)-Lahore < / div> 数据结构和算法实验室 博士名单。通知2024 计划课程BS(荣誉)计算物理 课程标题生物膜和细胞信号 ... 的学生之间的计算机视觉综合征 BS生物技术 1727866077ENV。生物学NZ-116.pdf Muhammad Sajjad -Lahore 第六学期PBG-302繁殖纤维作物3(2-1)... 燃料和能源•代码编号:CHE 363•学期:6th 课程标题基因组学和蛋白质组学 人工智能简介(AI) 14。遗传学 植物学中的人工智能 全球挑战科学 - 课程大纲 经济动物学CR。 (2)简介 课程大纲 GQR-102:定量推理(II) APSY-356
学期学时20学期 - VI课程代码课程类型学会时间HQ-006古兰经强制性的翻译1 Chem-319物理化学I-I(化学动力学)强制性2 Chem-320物理化学化学(体温动力学)强制性2化学-321物理化学实验室强制性化学1 Chemistory 1 Chemistor 1 Chemistor 1 Chemistor 1 Comportor 2 Comprions 2 Comportion 1 Chemistor 1 Comportor 2 Comistry 1 Comportor 2 Cosistry 2 Comistry 1 Chemistry 1 Comportion 2 Comistor 2 Chem-323 Inorganic Chemistry-II (f-block elements) Compulsory 2 Chem-324 Inorganic Chemistry Lab Compulsory 1 Chem-325 Organic Chemistry-I (Reaction Mechanisms-I) Compulsory 2 Chem-326 Organic Chemistry-II (Spectroscopy) Compulsory 2 Chem-327 Organic Chemistry Lab Compulsory 1