机构名称:
¥ 1.0
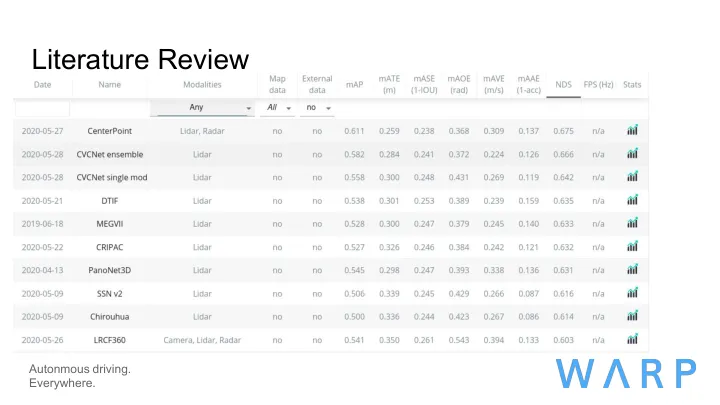
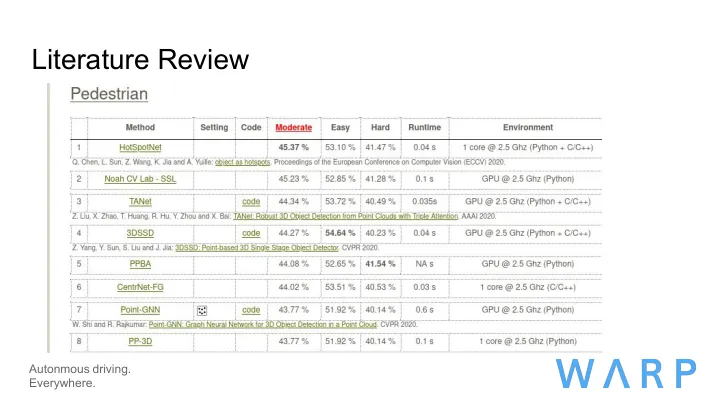
LIDAR和SLAM为我们提供了一个离线的全球地图,但是我们需要检测动态障碍,最重要的是行人,以及在录制全球地图时不存在的汽车,骑自行车的人和其他物体。基于Intel Realsense和Livox 100中激光雷达的实时图像,我们需要确定3D中障碍物的位置和类别。
经纱视觉-Kerem Yildirir
主要关键词
相关文件推荐