XiaoMi-AI文件搜索系统
World File Search System视频数据
基于导航雷达回波视频数据的占据栅格地图构建方法
摘 要 : [ 目的 ] 为解决无人艇的船载导航雷达对养殖区 、 浮筒 、 小型漂浮物等海洋漂浮障碍物感知效果不 佳的问题 , 提出一种基于导航雷达回波视频数据构建与更新的占据栅格地图的环境感知方法。 [ 方法 ] 首 先 , 采用多级集合的形式描述雷达点迹与回波点间的包含关系 , 为栅格地图构建奠定基础 , 期间 , 基于群相邻 关系对近邻点迹进行凝聚 , 抑制目标分裂导致的航迹偏差 ; 然后 , 利用所提的基于自然对数函数的占据栅格 地图概率更新算法 , 通过合理利用历史数据区分海杂波与微小海洋漂浮障碍物 ; 最后 , 建立基于点迹属性的 栅格地图概率扩散模型 , 以较好地保证典型动态目标占据栅格更新的实时性。 [ 结果 ] 实船试验结果表明 , 所提方法可准确获取养殖区 、 浮筒等成片海洋漂浮障碍物的轮廓信息 , 抑制目标分裂现象 ; 与经典方法相比 , 所提方法对干舷 0.5 m 的小型漂浮物首次发现距离提升了 78.34 m , 定位精度提升了 1.42 m 。 [ 结论 ] 所提方 法能够实现对多种海洋漂浮障碍物 、 海面运动目标的准确感知 , 确保无人艇航行安全。
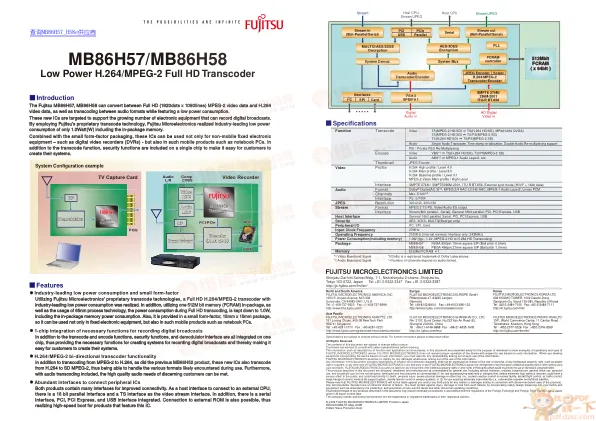
MB86H57/MB86H58
富士通 MB86H57、MB86H58 可在全高清(1920 点 x 1080 线)MPEG-2 视频数据和 H.264 视频数据之间进行转换,并可在音频格式之间进行转码,同时功耗较低。这些新 IC 旨在支持越来越多能够录制数字广播的电子设备。通过采用富士通专有的转码技术,富士通微电子实现了业界领先的低功耗,包括封装内存储器在内,仅为 1.0 瓦。结合小尺寸封装,这些 IC 不仅可用于非移动固定电子设备(如数字视频录像机 (DVR)),还可用于笔记本电脑等移动产品。除了转码功能外,单个芯片上还包含安全功能,方便客户轻松创建自己的系统。

从互联网视频中学习通才机器人
将深度学习扩展到大量,多样化的互联网数据已经在视觉和自然语言的理解和产生中产生了极大的一般能力。但是,在机器人技术中收集的数据仍然稀缺和挑战,看到机器人学习难以获得类似的一般能力。从视频(LFV)方法中学习的有希望的学习旨在通过使用大型互联网视频数据来增强传统机器人数据来解决机器人数据瓶颈。此视频数据提供了有关身体行为和世界潜在物理学的广泛基础信息,因此对于通才机器人来说可能是非常有用的。在本调查中,我们介绍了LFV新兴领域的详细概述。我们概述了基本概念,包括LFV的好处和挑战。我们提供了当前方法的综合评论,以从大规模的互联网视频中提取知识,解决LFV中的关键挑战,并通过使用视频数据来提高下游机器人和强化学习。该调查以对LFV的挑战和机遇的批判性讨论结束。在这里,我们主张可扩展的基础模型方法,这些方法可以利用可用的互联网视频范围来改善机器人策略和动态模型的学习。我们希望这项调查能够为LFV的进一步研究提供信息,并推动发展通用机器人的进步。
MB86H57/MB86H58
富士通 MB86H57、MB86H58 可在全高清(1920 点 x 1080 线)MPEG-2 视频数据和 H.264 视频数据之间进行转换,并可在音频格式之间进行转码,同时功耗较低。这些新 IC 旨在支持越来越多能够录制数字广播的电子设备。通过采用富士通专有的转码技术,富士通微电子实现了业界领先的低功耗,包括封装内存储器在内,功耗仅为 1.0 瓦。结合小尺寸封装,这些 IC 不仅可用于非移动固定电子设备(如数字视频录像机 (DVR)),还可用于笔记本电脑等移动产品。除了转码功能外,单个芯片上还包含安全功能,方便客户轻松创建自己的系统。
异常帧提取和对象跟踪混合机器学习
摘要 — 由于视频数据提供了多种实例的详细信息,使用视频数据进行事件检测变得越来越流行。这种流行增加了设备数量的使用和来自各种来源的数据量,这使得对异常事件的手动检测变得非常复杂,最近的研究要求高度及时和高度准确的自动化过程。因此,这项工作提出了一个三阶段解决方案来解决这个问题:使用混合分割过程进行物体检测,准确率为 97%,使用预先训练的机器学习模型检测物体,准确率为 98%,使用预测回归模型检测运动,平均时间为 58 纳秒。这项提议的工作已经展示了基准测试结果,并展示了高度准确的检测过程,使基于视频的监控更安全、更好。
异常帧提取与物体跟踪混合...
摘要 — 由于视频数据提供了多种实例的详细信息,使用视频数据进行事件检测变得越来越流行。这种流行增加了设备数量的使用和来自各种来源的数据量,这使得对异常事件的手动检测变得非常复杂,最近的研究要求高度及时和高度准确的自动化过程。因此,这项工作提出了一个三阶段解决方案来解决这个问题:使用混合分割过程进行物体检测,准确率为 97%,使用预先训练的机器学习模型检测物体,准确率为 98%,使用预测回归模型检测运动,平均时间为 58 纳秒。这项提议的工作已经展示了基准测试结果,并展示了高度准确的检测过程,使基于视频的监控更安全、更好。

具有三个 11 位 DAC、CGMS 数据插入的 THS8200 全格式过采样分量视频/PC 图形 D/A 系统数据表 (Rev. E)
输出合规范围可通过外部调整电阻器进行设置,并且有两种设置可供选择,以适应分量视频或 PC 图形 (700 mV) 和复合视频 (1.3 ‑ V) 输出,而无需更改硬件。视频数据的内部可编程剪辑/移位/乘法功能可确保全 10 位或降低的 ITU-R.BT601 样式视频输入符合标准的视频输出范围。为了避免视频范围缩放后的非线性,DAC 内部具有 11 位分辨率。此外,可以仅在绿色/亮度通道或所有三个输出通道上插入具有可编程幅度的双电平或三电平同步(以支持 700 mV:300 mV 和 714 mV:286 mV 视频:同步比率)。该同步插入是由 DAC 中的附加电流源生成的,这样完整的 DAC 分辨率对于视频范围仍然可用,并为视频数据保留 DAC 的 11 位动态范围的 100%。

GeoTrack:由网络生物启发的全球视频跟踪...
使用 Toyon 的 IPVT 算法处理来自 UAS 传感器的视频数据(第 4.1 节)。图像平面中的目标检测和/或目标轨迹被发送到融合和跟踪数据库,我们将其称为全球融合和跟踪中心 (GFTC),因为它将处理来自多个 UAS 的视频数据并在地球坐标系中对该数据进行地理参考(第 4.2 节)。GFTC 还从自动驾驶仪接收有关 UAS 平台和传感器的状态遥测。此信息与视频数据同步,以在纬度/经度坐标中对图像平面检测/轨迹进行地理定位。UAS 运动控制算法将使用这些轨迹位置来协助操作员规划 UAS 平台路线并瞄准 UAS 传感器,以优化跟踪性能(第 4.4、4.5 和 4.6 节)。该 UAS 的轨迹位置和未来路线/任务计划被发送到 UAS 自动驾驶仪执行,并且还传送给其他 GeoTrack UAS,以促进合作跟踪并提高目标估计准确性(第 4.3 节)。

引用发布版本(APA):Ntelopoulos,A。和Nasrolllahi,K。(2024)。呼叫:级联自动编码器和视频异构的大型语言模型
摘要 - 本文使用3D深度自动编码器和大型视觉语言模型(LVLM)介绍了一种新方法,以弥合视频数据和多模式模型之间的差距,以进行视频异常检测。该研究探讨了先前架构的局限性,尤其是在遇到分布外实例时缺乏专业知识。通过在同一管道中集成自动编码器和LVLM,该方法可以预测异常的存在并提供详细的解释。此外,这可以通过采用二进制分类并自动提示新查询来实现。测试表明,系统的推论能力为工业模型的缺点提供了有希望的解决方案。但是,缺乏用于异常检测的高质量指导遵循视频数据需要一种弱监督的方法。公认的LLM领域的当前局限性,例如物体幻觉和低物理学感知,突出了需要进一步研究以改善视频异常检测域的模型设计和数据质量。

使用
摘要 - 视频数据是最容易访问的信息手段。这项研究的目的是使用RC4钥匙发生器结合Beaufort和Vigenere替代密码,以生成通过Web在数据传输过程中抗攻击的加密视频。Vigenere加密算法和Beaufort芯片机是一种经典的加密算法,其相同的宣传字符并不总是形成相同的密码字符,这意味着所得的密码能够掩盖纯文本模式。RC4是用于制造Keystream的流密封加密算法。发现对30个AVI视频文件的研究结果发现加密和解密过程是成功的。视频框架文件大小与加密和解密的计算时间成正比。对三个视频数据样本测试数据组的测试结果获得了17分17秒的加密所需的平均时间,并获得了17分40秒的解密。随机加密质量,其中三组的音频给出了平均MSE±15883和PSNR±0.612 dB。MSE 0和PSNR无限证明了完美的解密质量。Beaufort和Vigenere芯片机与RC4密钥生成器的组合强烈建议通过Web进行数据传输过程。关键字:视频加密,Avi,Vigenere,Beaufort,RC4。摘要 - 视频数据是最广泛访问的信息介质。这项研究的目的是使用RC4密钥生成器将Beaufort和Vigenere替换量牌组合到生产者加密视频中,该视频在网络上可以在数据传输数据期间抗攻击。Vigenere和Beaufort Cipher加密算法是经典的加密算法,其中相同的明文字符并不总是形成相同的密码字符,这意味着所产生的密码能够掩盖宣传模式。rc4是一种用于键流创建的流密码加密算法。对30个AVI视频文件的研究结果表明,加密和解密过程是成功的。视频框架文件的大小与加密和解密计算时间成正比。测试三组测试样本视频数据的结果获得了17分钟17秒的加密所需的平均时间和17分40秒的解密。随机加密的质量,其中三组的音频的平均MSE为±15883,PSNR为±0.612 dB。MSE 0和无限PSNR证明了完美的解密质量。Beaufort和Vigenere Cipher与RC4密钥生成器的组合强烈建议通过Web进行数据传输过程。关键字:视频加密,Avi,Vigenere,Beaufort,RC4