机构名称:
¥ 1.0
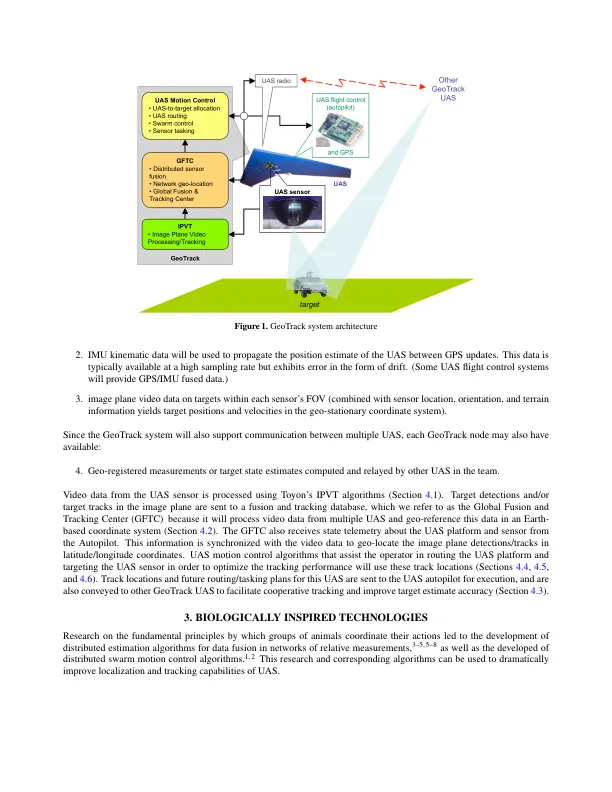
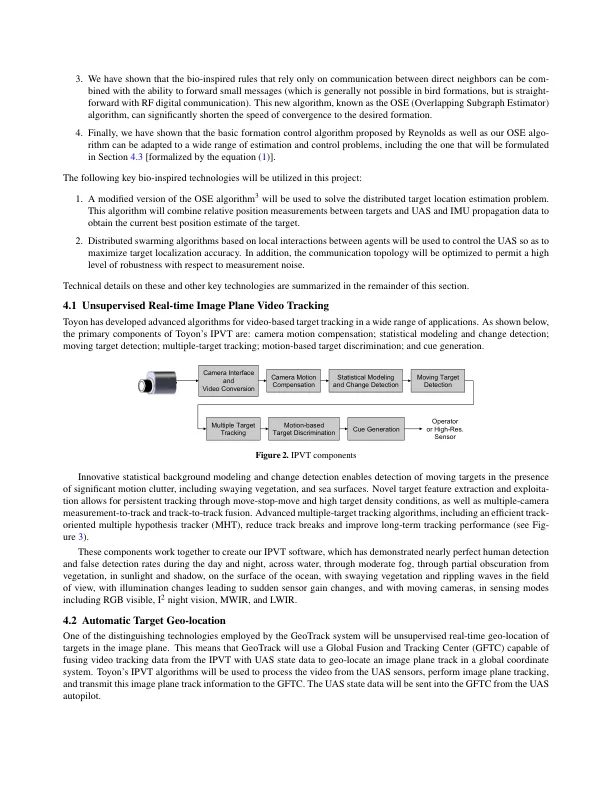
使用 Toyon 的 IPVT 算法处理来自 UAS 传感器的视频数据(第 4.1 节)。图像平面中的目标检测和/或目标轨迹被发送到融合和跟踪数据库,我们将其称为全球融合和跟踪中心 (GFTC),因为它将处理来自多个 UAS 的视频数据并在地球坐标系中对该数据进行地理参考(第 4.2 节)。GFTC 还从自动驾驶仪接收有关 UAS 平台和传感器的状态遥测。此信息与视频数据同步,以在纬度/经度坐标中对图像平面检测/轨迹进行地理定位。UAS 运动控制算法将使用这些轨迹位置来协助操作员规划 UAS 平台路线并瞄准 UAS 传感器,以优化跟踪性能(第 4.4、4.5 和 4.6 节)。该 UAS 的轨迹位置和未来路线/任务计划被发送到 UAS 自动驾驶仪执行,并且还传送给其他 GeoTrack UAS,以促进合作跟踪并提高目标估计准确性(第 4.3 节)。
GeoTrack:由网络生物启发的全球视频跟踪...
主要关键词

相关文件推荐