XiaoMi-AI文件搜索系统
World File Search System警告系统
向专家学习
高级技术培训课程从空气制动培训结束的地方开始*。本课程涵盖高级安全系统和软件的操作和故障排除。主题包括防抱死制动系统 (ABS)、Bendix® ESP® 全稳定系统、Bendix® Wingman® Advanced™ – 碰撞缓解技术、AutoVue® – 车道偏离警告系统、我们的旗舰产品 Bendix® Wingman® Fusion™ 驾驶员辅助系统系列、SmarTire® 和 SmarTire Trailer-Link™ 轮胎压力监测系统 (TPMS) 等。课程时间包括 Bendix® 空气盘式制动器和电气诊断的深入、动手维护。制动和稳定性技术的进步使这成为高级技术人员的必修培训。
ITU-R M.2059-0 建议书
无线电高度计的基本功能是在飞机进场、着陆和爬升阶段提供精确的高度测量,这些测量代表了各种反射率,具有很高的精度和完整性。此类信息用于多种用途,无论地球表面如何,都必须实现这些测量的高精确度和完整性,例如在自动进场着陆的最后阶段的最后进场和拉平引导期间。它还用于确定飞机可以安全着陆的特定高度,并作为地形感知警告系统 (TAWS) 的输入,该系统在预定的高度和接近率下发出“拉起”警告;并作为防撞设备和气象雷达(预测风切变系统)、自动油门(导航)和飞行控制(自动驾驶)的输入。
附件 6
2.4.4 在水面上空飞行的飞机 ...................................................................................................................... 2.4-3 2.4.5 在指定陆地区域上空飞行的飞机 ........................................................................................................ 2.4-4 2.4.6 高空飞行的飞机 ...................................................................................................................... 2.4-5 2.4.7 所有按照仪表飞行规则运行的飞机 ............................................................................................. 2.4-5 2.4.8 在夜间飞行的飞机 ...................................................................................................................... 2.4-6 2.4.9 符合附件 16 第 I 卷噪声认证标准的飞机 ............................................................................. 2.4-6 2.4.10 马赫数指示器 ............................................................................................................................. 2.4-6 2.4.11 需要配备近地警告系统(GPWS)的飞机 ............................................................................. 2.4-6 2.4.12 紧急定位发射机(ELT) ................................................................................................ 2.4-8 2.4.13 需要配备压力高度报告应答器的飞机 .............................................................. 2.4-8 2.4.14 麦克风 ................................................................................................................................

Microsoft Word - CWS HF Insights Task 5 Final Rpt V5 mj edits.doc
16.摘要 该项目的目标是为强调驾驶员表现和安全性的碰撞警告设备开发人为因素见解和经验教训。该项目反映了与有效实施碰撞警告系统界面相关的人为因素文献的重要回顾;从这些文献中吸取的经验教训在界面设计和驾驶员表现指南方面具有特征。本文件旨在强调要解决的问题并为碰撞警告系统 (CWS) 的开发提供指导;此处提供的指南反映了最佳的人为因素信息,既不是要求也不是强制要求。提供了与 CWS 设备的驾驶员-车辆界面 (DVI) 相关的各种主题的信息。第 2 章至第 11 章包含通过这项工作产生的设计指南。第 2 章提供了 CWS 设计的一般准则,重点关注与警告级别和警告优先级相关的问题,以及防止误报和干扰警报的建议。第 3 章提供了呈现听觉警告的准则,重点关注听觉警告的各种选项的选择和设计,包括简单音调、耳标、听觉图标和语音消息。第 4 章提供了视觉警告的准则,重点关注使用视觉显示的建议以及确定最合适的视觉显示。第 5 章提供了触觉警告的准则,重点关注使用触觉显示的建议以及确定最合适的触觉警告。第 6 章提供了一组用于选择和设计 CWS 设备用户控件的准则。第 7、8 和 9 章分别提供了前方碰撞(车距警告)、车道变换(盲点警告)和道路偏离警告的指南;这些章节中的每一章都提供了开发警示和紧急警告的指导,以及针对视觉、听觉和触觉警告的设备特定指导。第 10 章提供了一系列针对重型卡车和公共汽车应用的指南。
预警系统:监视纳米比亚的牧场
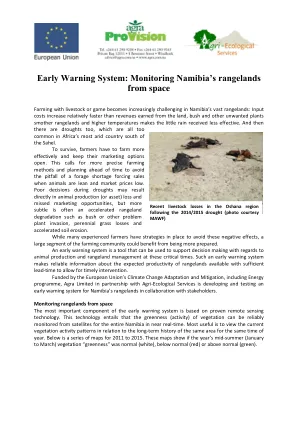
由欧盟的气候变化适应和缓解措施资助,包括能源计划,与农业生态服务合作,Agra Limited正在与利益相关者合作开发和测试纳米比亚牧场的预警系统。从空间监控牧场的早期警告系统中最重要的组成部分是基于经过验证的遥感技术。这项技术需要从近乎实时的整个纳米比亚的卫星中可靠地监测植被的绿色(活动)。最有用的是查看与一年中同一地区的长期历史有关的当前植被活动模式。以下是2011年至2015年的一系列地图。这些地图显示了一年的仲夏(1月至3月)植被“绿色”(白色),低于正常(红色)或高于正常(绿色)。
手册 - 服务箱 - 雪铁龙
驾驶建议 118 使用钥匙启动 / 关闭发动机 120 使用无钥匙进入和启动功能启动 / 关闭发动机 122 驻车制动器 125 5 速手动变速箱 125 自动变速箱 (EAT6) 126 换档指示灯 129 上坡起步辅助 130 停止和启动 131 识别速度限制和建议标志 133 限速器 137 巡航控制 139 碰撞风险警报和主动安全制动 142 疲劳检测系统 145 车道偏离警告系统 147 盲点监控系统 148 停车传感器 150 倒车摄像头 152 轮胎充气不足检测 153 CITROËN ConnectedCAM™ 155

ID.7 Pro S Nardo
诸如连接的旅行辅助系统具有在线数据利用率的系统可选为新ID.3。该系统在整个速度范围内实现了辅助纵向和横向指导7,并在高速公路上辅助车道更换7。此外,如果有在线数据可用7,则可以使用未检测到的车道标记的车道指南7。Park Assist Plus和系统的内存功能(自动执行保存的停车操作,在7米7米7中的距离内可用)。Park Assist Pro包括一个远程停车功能5/7,用于通过智能手机应用程序停车。出口警告系统5是ID的新成员。3产品线:在系统限制内,如果道路用户从后面接近,它可以警告驾驶员不要打开门之一。

自动驾驶汽车驾驶员疲劳多方法检测
摘要:本文概述了开发模糊决策算法的各种方法,该算法旨在监控和发出有关驾驶员困倦的警告。该算法基于分析 EOG(眼电图)信号和眼部状态图像,目的是防止事故发生。困倦警告系统由关键组件组成,这些组件可以了解、分析和决定驾驶员的警觉状态。如果驾驶员被识别为处于困倦状态,则此分析的结果可以触发警告。驾驶员困倦的特点是对道路和交通的注意力逐渐下降,驾驶技能下降,反应时间增加,所有这些都会增加发生事故的风险。如果驾驶员没有对警告做出反应,ADAS(高级驾驶辅助系统)系统应进行干预,接管车辆的命令。