XiaoMi-AI文件搜索系统
World File Search System计划者
BCOM研究计划者2025-商业与经济学学院
在这些领域进行研究,以及用于人寿保险,退休金和一般保险的精算建模,是BCOM学位的精算流的基础。学生学习各种技能,其中最重要的是数学建模和计算,这使他们能够进入保险和财务部门以及其他地方的各种行业职位。在澳大利亚,目前有2100名合格精算师。这些精算师中约有20%从事人寿保险工作,10%的养老金工作,20%的一般保险工作,其余的工作则用于金融和投资,管理,政府,分析公司和大学。许多澳大利亚精算师在海外工作。
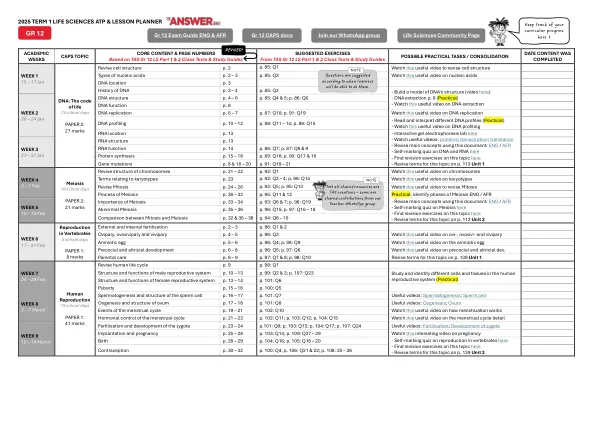
2025学期1 Life Sciences ATP和课程计划者
RNA位置p。 13-互动凝胶电泳实验室 - 观看有用的视频:蛋白质;转录;翻译 - 使用此文档进行修订的主要概念:ENG / AFR-在此处对DNA和RNA上的自我标记测验 - 在此处找到有关此主题的修订练习 - 在p上修改此主题的术语。 113单元1RNA位置p。 13-互动凝胶电泳实验室 - 观看有用的视频:蛋白质;转录;翻译 - 使用此文档进行修订的主要概念:ENG / AFR-在此处对DNA和RNA上的自我标记测验 - 在此处找到有关此主题的修订练习 - 在p上修改此主题的术语。 113单元1

一个多功能的计划者,用于学习灵巧和整体...
摘要:由于不连续的动力学以及高维状态和动作空间,机器人的操作具有挑战性。在操纵任务中成功的数据驱动方法通常需要大量数据和专家证明,通常来自人类。现有的计划者仅限于特定系统,并且通常依靠用于使用演示的专业算法。因此,我们引入了一名灵活的运动计划者,该计划量身定制了灵巧和全身锻炼任务。我们的计划者可以为增强学习算法创建可用的演示,从而消除了对额外的培训管道复杂性的需求。使用这种方法,我们可以有效地学习复杂的操纵任务的政策,仅传统的强化学习只会取得很少的进步。此外,我们证明了学习的政策可以转移到真正的机器人系统中,以解决复杂的灵巧操纵任务。项目网站:https://jacta-manipulation.github.io/
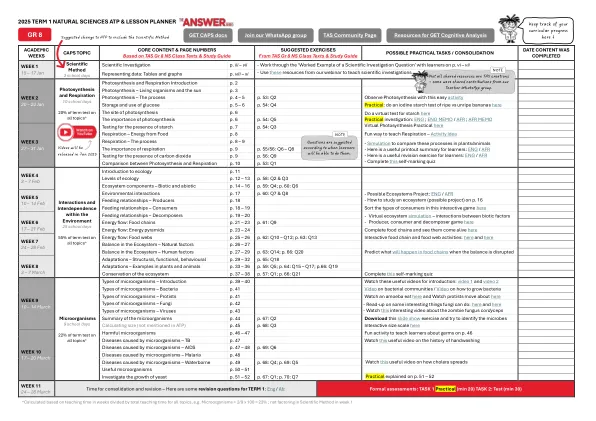
2025学期1自然科学ATP和课程计划者-GR 8
呼吸 - 过程p。 8 - 9-比较动植物中这些过程的模拟 - 这是学习者的有用打印摘要:Eng / AFR-这是学习者的有用的修订练习:Eng / Afr-完成此自我标记的测验< / div> < / div>
Dean Pattalis-计划者日期:2024年7月24日主题
本备忘录的目的是告知小组,理事会在6月12日由小组最初的决定延期后收到了进一步的信息。面板最初推迟的决心重新宣传了该应用程序,因为该申请的作品最初被通知为仅位于Wearden Road 11号,尽管也侵占了11个Towarri Place。重新通知期开始后,Wearden Road和13 Towarri Place的所有者向理事会表示关注,以此提出的申请。其他所有者提出的问题包括一个事实,即提议的边界墙和栅栏不在Wearden Road和6 Glade之间的边界线上,而是仅位于边界的西侧。财产所有人表示,他们不知道这种安排,也没有做出监督。这是尽管提议的围栏位于以前倒塌的墙壁和围栏的相同位置,该墙壁和栅栏也位于边界的西侧。此外,也引起了理事会的注意,即JK Geotechnics于2022年6月16日提供的申请进行的岩土技术调查,未经顾问的知识或批准进行了修改。因此,理事会认为调查报告以及Kysu结构和土木工程师(2024年2月7日)的支持信无效。根据上述事件,申请人提供了以下更新的信息:

区域拆分中的倡导者计划者:社交网络分析方法
摘要:涉及演员的倡导计划的论述尚未明确解决演员倡导者计划者是谁以及演员如何成为倡导者计划者的问题。本文试图在区域拆分的背景下探索演员倡导者计划者,并采用社交网络分析作为研究工具。本研究采用探索性的混合方法方法,本质上主要是定性的。最初的阶段需要通过从与参与地区分割的主要利益相关者(包括社区,非政府组织(NGOS),政府实体和政党)的访谈中获取信息来调查和检查定性数据。随后的阶段利用了定量分析结果得出的定量技术,然后将其分析到GEPHI应用中。调查结果表明,区域分裂总统社区代表民间社会,政党是至关重要的倡导者计划者,促进了不同的参与者之间的联系,并通过政党促进区域分裂。

JW万豪帕克·温哥华会议计划者指南
一家受自然环境启发的现代酒店,并为LEED Gold Cervification精心设计| 60,000平方英尺的灵活功能空间,所有级别都方便地位于一个级别上|温哥华最大的酒店宴会厅15,604平方英尺的Parq Grand Ballroom,设有23英尺的天花板,可容纳1,144位客人|另外两个宴会厅提供了适应较小活动的灵活性| 30,000平方英尺的屋顶绿色空间,具有户外用餐能力| 22个突破室,可欣赏落地景观和最先进的视听技术|有线和无线互联网访问

基于LPV MPC和可及性分析的自动驾驶的安全运动计划者
本文为自动驾驶汽车的避免碰撞挑战提供了一种创新的优化解决方案。提出的方法包括一个在线运动计划者,旨在定义可行有效的途径,能够处理动态环境,同时隐含地确保拟议的演习中的安全性。考虑在运动计划者内部移动障碍的事实增加了问题的复杂性,而迫使它像其他人一样频繁地执行。为了降低这种计算复杂性,该方法以两个阶段的翻译进行了计数,将常用的非线性优化结构的两个阶段翻译成QP公式,可以很容易地解决。第一阶段是基于在车辆的动态约束中使用LPV矩阵。第二阶段包括基于设定的传播进行可及性分析,以获取可保证安全条件的允许输入和可触及状态的线性表达式。

Drplanner:使用大语言模型的自动化车辆的运动计划者的诊断和维修
摘要 - 动感计划者对于在各种情况下自动化车辆的安全操作至关重要。但是,没有运动计划算法在文献中实现了完美,并且提高其绩效通常是耗时且劳动力密集的。为了解决上述问题,我们提出了Drplanner,这是第一个旨在使用大型语言模式自动诊断和维修运动计划者的框架。最初,我们从天然和编程语言中生成了计划者及其计划的轨迹的结构化描述。利用大型语言模型的深刻功能,我们的框架返回了修复的计划者,并具有详细的诊断描述。此外,我们的框架在评估修复结果的评估中持续反馈在迭代上进步。使用基于搜索和采样的运动计划者为自动车辆验证我们的方法;实验结果强调了在提示中进行演示的需求,并表明了我们框架有效识别和纠正难以捉摸的问题的能力。