
机构名称:
¥ 2.0
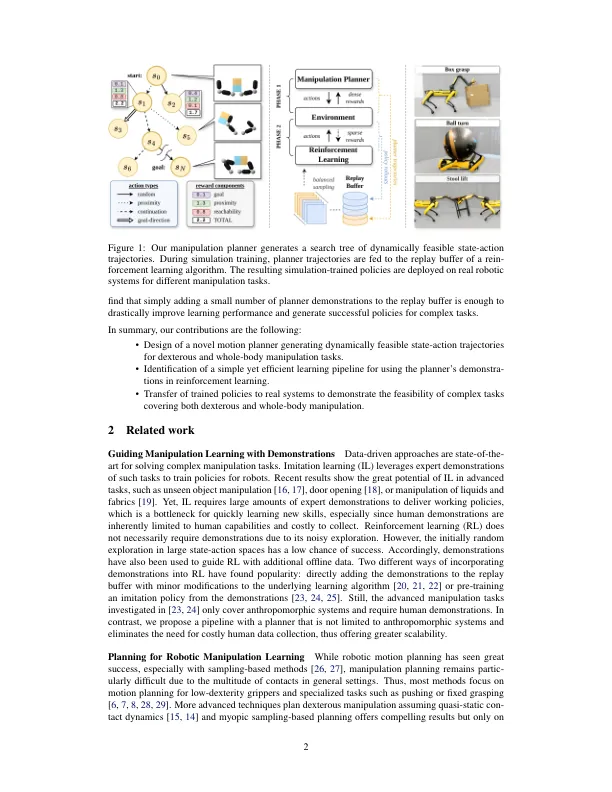
摘要:由于不连续的动力学以及高维状态和动作空间,机器人的操作具有挑战性。在操纵任务中成功的数据驱动方法通常需要大量数据和专家证明,通常来自人类。现有的计划者仅限于特定系统,并且通常依靠用于使用演示的专业算法。因此,我们引入了一名灵活的运动计划者,该计划量身定制了灵巧和全身锻炼任务。我们的计划者可以为增强学习算法创建可用的演示,从而消除了对额外的培训管道复杂性的需求。使用这种方法,我们可以有效地学习复杂的操纵任务的政策,仅传统的强化学习只会取得很少的进步。此外,我们证明了学习的政策可以转移到真正的机器人系统中,以解决复杂的灵巧操纵任务。项目网站:https://jacta-manipulation.github.io/
一个多功能的计划者,用于学习灵巧和整体...
主要关键词



相关文件推荐





























