XiaoMi-AI文件搜索系统
World File Search System设计挑战
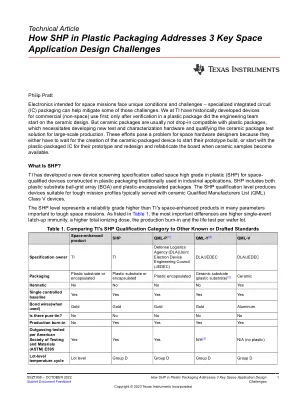
塑料包装中的 SHP 如何解决 3 个关键的空间应用设计挑战
用于太空任务的电子设备面临着独特的条件和挑战——专用集成电路 (IC) 封装可以帮助缓解其中的一些挑战。我们 TI 历来首先开发用于商业(非太空)用途的设备;只有在塑料封装中验证后,工程团队才开始进行陶瓷设计。但陶瓷封装通常与塑料封装不兼容,这需要开发新的测试和特性硬件,并使陶瓷封装测试解决方案符合大规模生产的要求。这些工作给太空硬件设计师带来了问题,因为他们要么必须等待陶瓷封装设备的创建才能开始构建原型,要么从塑料封装 IC 开始构建原型,然后在陶瓷样品可用时重新设计和重新制造电路板。

常见的电感和电容传感应用
表格列表表 2-1. 设计挑战................................................................................................................................................................ 7 表 2-2. 其他相关资料................................................................................................................................................. 7 表 3-1. 器件建议....................................................................................................................................................... 10 表 3-2. 设计挑战....................................................................................................................................................... 10 表 3-3. 相关资料....................................................................................................................................................... 10 表 4-1. 设计挑战....................................................................................................................................................... 13 表 4-2. 相关资料....................................................................................................................................................... 13 表 5-1. 器件建议....................................................................................................................................................... 17 表 5-2. 设计挑战....................................................................................................................................................... 18 表 5-3. 相关资料....................................................................................................................................................... 18

“人工智能及其在……中的应用”研讨会
完成课程后,学生将全面了解基本的 AI 和 ML 概念,并在建模、实验和分析 AI/ML 算法方面具有实践能力。他们将了解 VLSI 设计的最新研究,并深入了解设计挑战、非理想效应和 EDA 工具。学生将学习结合 AI/ML 方法来解决从设备到系统等各个抽象级别的 VLSI 设计挑战,并获得使用 MATLAB、Python、Cadence、Xilinx-Verilog 和 FPGA 等 CAD 工具的实践经验。此外,他们将通过从事面向应用的 VLSI 系统项目来培养项目开发技能,使他们能够有效地将知识应用于现实场景。


先进设计与原型技术研究所 (...
ADaPT 研究所与行业和研究伙伴合作,通过提供从高级定制设计到制造的端到端数字解决方案来解决工程和设计挑战,利用我们广泛的学术专业知识和尖端设备进行先进制造、3D 建模和模拟以及产品性能验证。
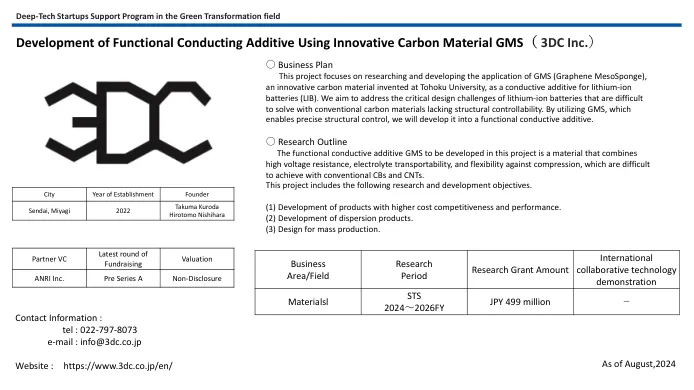
使用创新的碳材料GMS(3DC Inc.)开发功能传导添加剂
○业务计划该项目着重于研究和开发GMS(石墨烯Messponge)的应用,这是Tohoku University发明的创新碳材料,是锂离子电池(LIB)的导电添加剂。我们旨在应对缺乏结构可控性的常规碳材料难以解决的锂离子电池的关键设计挑战。通过利用GM,这可以实现精确的结构控制,我们将其发展为功能性导电添加剂。
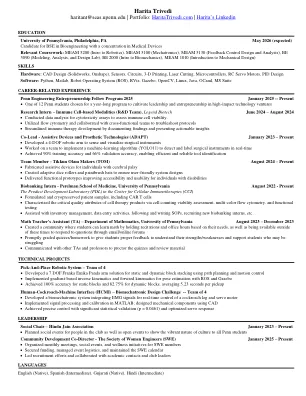
Harita Trivedi-工程企业家精神
人类核对机界面(HCMI) - 生物学的设计挑战 - 4个团队•开发了一个集成EMG信号的生物新学系统,用于实时控制蟑螂腿和伺服电机•MATLAB中的实施信号处理和校准;使用CAD设计的机械组件•实现了具有重大统计验证的精确控制(P = 0.0461)并优化的伺服响应

连接器 - Simpson Strong-Tie
在 Simpson Strong-Tie ®,我们知道并非所有建筑设计挑战都可以通过现成的连接器克服。我们不断与房屋建筑商和设计师合作,开发解决方案以满足他们不断变化的需求。除了持续的产品系列开发外,我们的工程和生产团队还可以帮助提供这些“一次性”解决方案,并按需制造它们。无论您需要什么,我们都致力于成为全球建筑工地上最值得信赖的建筑解决方案来源。

低质量星际探测器通信的技术挑战
在论文初步设计的基础上,本文总结了从比邻星附近返回科学数据的低质量星际探测器群的下行链路,其中最关键的技术问题,并在整个系统设计的背景下解释了它们的重要性。主要目标是确定如果使用目前可用的现成技术构建这样的下行链路,将面临哪些主要挑战或障碍,从而为未来对组成设计挑战和技术的研究提供方向和动力。虽然没有任何基本的物理限制会阻碍这种通信系统,但目前可用的技术在几个方面存在严重不足,还有其他一些重大的设计挑战,其解决方案尚不确定。已确定的最大挑战是质量限制、从多个探测器到同一目标系外行星的多路复用同时通信、姿态控制和指向精度以及由于探测器速度不确定性导致的多普勒频移。最大的技术挑战是电力、高功率和波长灵活的光源、选择性强且波长灵活的光学带通滤波器组以及暗计数率极低的单光子探测器。对于其中的一个关键子集,我们描述了我们遇到的困难的性质及其在整个系统环境中的起源。我们还考虑了将接收限制为单个探测器的接收器,并将其与群体情况进行了比较。

吉列体育场 2024 年 9 月 25 日
学生是制造业 Mash-Up 不可或缺的一部分,它为他们提供了探索制造业职业机会的机会。他们将参与设计挑战,与领先的制造商和创新者互动,并聆听鼓舞人心的演讲者,所有这些都将让他们看到制造业的未来可能性。我们将接待 500 名高中生、100 名社区大学学生和来自大伍斯特的 Big Brothers and Big Sisters 组织的 300 名成员。