XiaoMi-AI文件搜索系统
World File Search System软体
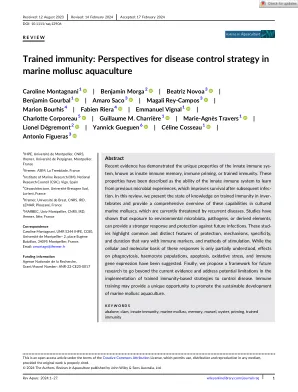
训练免疫:海洋软体动物养殖疾病控制策略的前景
图 1 无脊椎动物和水产养殖软体动物的训练免疫反应模型比较。该图说明了在无脊椎动物和海洋软体动物中观察到的训练反应的多样性。图中显示了训练诱导(初级反应)和挑战(次级反应)后随时间推移的免疫反应。文献中描述的不同反应模式用不同颜色的曲线表示。图例表示观察到不同模式的物种:训练后诱导的持续反应,没有消退阶段,一直持续到次级反应(深蓝色线);免疫转变显示出性质上不同的初级和次级反应,涉及不同的基因组(浅蓝色和深绿色线);耐受反应有初级反应但没有次级反应(浅蓝色线)。双相反应,称为回忆反应,有初级反应后是消退阶段,对后续挑战有类似或更强和更快的次级反应(浅绿色线)。
基于柔性传感的软体机器人交互研究进展
摘要:本文旨在总结基于灵活感测的软机器人相互作用研究的进展。首先,引入了软机器人实际应用中的最新进步,例如灵活的抓握,生物医学和环境探索。其次,提出了软机器人的运动学和动态建模方法。随后,分析了适用于软机器人的灵活感测技术,特别是针对讨论的讨论表现出圆润的多模式传感技术。然后,阐明了关于软机器人中传感和智能相互作用的当前研究状态,这表明了灵活的传感器用于固有和环境感知以及多峰传感的利用。重点是基于灵活传感器的软机器人的智能相互作用系统的分析。最后,讨论和预期基于灵活感测的软机器人相互作用研究中的潜在挑战和前瞻性方向。关键字:软机器人;灵活的传感;智能交互系统

菲律宾Surigao市潮间花软体的生物多样性
与国际自然保护联盟或IUCN(2016年),约有1088种被归类为濒危或严重威胁,其中27%被评估为数据缺陷,表明数据不足以完全评估保护状态。截至2016年9月,国际自然保护联盟(IUCN)列出了507种濒临灭绝的软体动物,占所有评估的软体动物物种的7.0%。此外,IUCN列出了9个Mollusk亚种为濒危。这些数量强调了被归类为濒危物种的大量软体动物,强调了保护这些物种及其栖息地的必要性(IUCN,2016年)。对软体动物种群的持续威胁不仅对环境和生态系统有害,而且是由于

了解抗抑郁药物污染对软体动物的特定目标影响:系统评价方案
广泛用于人类的药物在环境中的流行令人担忧,这些药物针对的是存在于各个门类中的关键进化保守生物分子。抗抑郁药是全球使用最广泛的药物之一,其开发目标是针对调节单胺能神经传递的生物分子,从而干扰多种关键神经生理过程的内源性调节。此外,抑郁症发病率的迅速上升导致抗抑郁药的处方和消费率上升,这与全球水环境中抗抑郁药检测报告的增加相一致。因此,人们越来越担心长期接触环境中的抗抑郁药可能会对非目标水生生物造成不利的药物靶标特异性影响。虽然这些担忧导致了大量研究针对一系列毒理学终点,但不同类别抗抑郁药的环境水平对非目标水生生物的药物靶标特异性影响仍有待了解。有趣的是,有证据表明,软体动物可能比任何其他动物门都更容易受到抗抑郁药的影响,这使得它们在了解抗抑郁药对野生动物的影响方面具有无价的价值。本文描述了一种系统性文献综述方案,以了解不同类别抗抑郁药的环境水平对水生软体动物的药物靶标特定影响。这项研究将提供关键的见解,以了解和描述与监管风险评估决策相关的抗抑郁药的影响,和/或指导未来的研究工作。

部署带有软体机器人执行器的皮层脑电图系统
皮层电图 (ECoG) 是一种微创方法,在临床上经常用于绘制大脑致痫区域图并促进病变切除手术,并且在脑机接口应用中得到越来越多的探索。当前的设备存在局限性,需要在皮层表面覆盖率、空间电极分辨率、美观度和风险后果之间进行权衡,并且通常将映射技术的使用限制在手术室中。在这项工作中,我们报告了一种可扩展的技术,用于制造大面积软机器人电极阵列,并通过平方厘米的钻孔使用压力驱动的致动机制(称为外翻)将其部署在皮层上。可部署系统由多达六条预折叠的软腿组成,并使用水性加压溶液将其放置在皮层的硬膜下,并固定在小开颅边缘的基座上。每条腿都包含柔软的微加工电极和应变传感器,用于实时部署监控。在一项概念验证急性手术中,一个软机器人电极阵列被成功部署在一只小型猪的皮层上,以记录感觉皮层活动。这种软机器人神经技术为微创皮层手术和与运动和感觉缺陷等神经系统疾病相关的应用开辟了有希望的途径。

围绕淡水软体动物生态系统服务的知识获得和差距
摘要生态系统为包括食物,水,气候调节和审美体验在内的人们提供必不可少的服务。生物多样性可以增强和稳定生态系统功能,并提供自然系统提供的服务。淡水软体动物是一个多元化的群体,通过其喂养习惯(例如过滤器喂养,放牧),对食物网的自上而下和自下而上的影响,提供各种生态系统服务,提供栖息地,提供栖息地,用作人们的食品资源以及文化重要性。研究重点是量化软体动物影响生态系统服务的直接和间接方式,可以帮助政策制定者和公众了解软体动物社区对社会的价值。淡水软体动物保护协会强调了在其2016年国家保护本地淡水软体动物的国家战略中评估软体动物生态系统服务的必要性,尽管已经取得了显着的进步,但在整个研究,管理和外展社区中取得了大量的工作,但仍有大量工作。我们将回顾本地淡水软体动物的全球状况,评估有关其生态系统服务的当前知识状态,并重点介绍最近的进步和知识差距,以指导进一步的研究和保护行动。我们的意图是为生态学家,保护主义者,经济学家和社会科学家提供信息,以改善基于科学的软体动物社区对健康水生系统的社会,生态和经济价值的考虑。

使用软体机器人可穿戴设备帮助肌萎缩侧索硬化症患者恢复手臂功能
尽管在康复领域取得了令人鼓舞的成果,但上肢机器人可穿戴设备(例如,针对因神经退行性疾病而导致身体残疾的人)是否可以制成便携式并适合日常使用仍不清楚。我们展示了一种轻巧、完全便携、基于纺织品、柔软可充气的可穿戴机器人,用于肩部抬高辅助,为上肢提供动态主动支撑。该技术在无电时机械透明,可以定量评估用户的自由运动,并且每个上肢仅增加 150 克的重量。在 10 名患有不同程度神经肌肉损伤的肌萎缩侧索硬化症 (ALS) 患者中,我们发现主动运动范围立即得到改善,并且两名 ALS 患者在 6 个月内持续的身体恶化得到补偿。除了运动能力的改善外,我们还表明,这种机器人可穿戴设备无需任何训练即可改善功能活动,恢复日常生活基本活动的表现。此外,肩部肌肉活动和肌肉自觉用力减少,同时握持物体的耐力增加,凸显了该装置减轻 ALS 患者肌肉疲劳影响的潜力。这些结果代表着上肢辅助、柔软、机器人可穿戴设备的日常使用又迈进了一步。

2021 年第九届欧洲软体学学会大会
米哈尔·霍萨克·马萨里克大学 伊万·贾里克 南波西米亚大学 贾斯娜·莱特纳 萨格勒布大学 妮可·利蒙丹-洛祖埃 法国国家科学研究中心 曼努埃尔·洛佩斯-利马 波尔图大学 杰弗里·内科拉·马萨里克大学 玛丽娜·皮里亚 萨格勒布大学 文森特·普里埃 国家自然历史博物馆 鲁伊·罗萨 里斯本大学 罗纳尔多·索萨 米尼奥大学 弗兰基·蒂伦 natur&ëmwelt 自然保护基金会 托马斯·威尔克 尤斯图斯·李比希大学 塔德乌什·扎亚茨 波兰科学院 亚历山大·齐里茨 诺丁汉大学

面向软体机器人的通用框架和材料数据库
为了推动软体机器人领域的发展,统一的材料本构模型和实验特性数据库至关重要。这将有助于使用有限元分析 (FEA) 来模拟其行为并优化软体机器人的设计。根据 ASTM D412 标准,对 17 种弹性体的样品进行了单轴拉伸试验,这些样品包括 Body Double™SILK、Dragon Skin™10 MEDIUM、Dragon Skin™20、Dragon Skin™30、Dragon Skin™FX-Pro、Dragon Skin™FX-Pro + Slacker、Ecoflex™00- 10、Ecoflex™00-30、Ecoflex™00-50、Rebound™25、Mold Star™16 FAST、Mold Star™20T、SORTA-Clear™40、RTV615、PlatSil ® Gel-10、Psycho Paint ® 和 SOLOPLAST 150318。详细描述了样品制备和拉伸试验参数。拉伸试验数据用于使用非线性最小二乘法推导超弹性材料模型的参数,并将其提供给读者。本文介绍了多种市售超弹性材料的机械特性和由此产生的材料特性,其中许多材料在软体机器人领域得到认可并广泛应用,还有一些材料从未被表征过。实验原始数据和用于确定材料参数的算法在软体机器人材料数据库 GitHub 存储库上共享,以实现可访问性,以及软体机器人社区的未来贡献。所展示的数据库旨在帮助软体机器人专家设计和建模软体机器人,同时为未来与软体机器人研究相关的材料特性提供一个起点。