XiaoMi-AI文件搜索系统
World File Search System辅助系统

使用机器学习的高级驱动程序辅助系统
汽车场景的快速进步促使人们广泛地关注创建创新,从而增加驾驶住宿以及专注于安全性。高级驾驶员帮助框架(ADA)已成为实现这些目标的重要空间。adas,包裹着诸如起飞训练,逃避逃避和多才多艺的旅程控制之类的元素,在调节不幸和改善大街福利方面是必不可少的部分。最近,AI(ML)方法与ADAS的结合开了新的发展道路。基于规则的算法在传统的ADAS系统中很常见,该系统可能在复杂而动态的驾驶环境中挣扎。AI具有从信息中调整和获得设计的能力,可以实现前景的有希望的变化。本文研究了ADA和AI之间的合作能量,意思是计划和评估使用两个空间质量的高级框架。必不可少的目标是通过减少AI计算的力来升级ADA功能的精度,强度和响应能力。通过使用不同且广泛的数据集,合并出血边缘预处理方法并利用不同的ML模型,我们尝试解决常规ADAS框架的限制,并为更精明和多功能的驾驶体验做准备。本文从最终的细分市场中展开,首先是对当前关于ADA和AI的自动应用程序的撰写的调查。之后,策略领域微妙的数据集,预处理步骤以及ML计算的选择和执行。结果和对话检查了提议的框架的呈现,揭示了对其生存能力和可能发展区域的见解。该论文通过总结关键的发现并提出了未来探索的道路来关闭,从而突出了将AI纳入ADA的非凡效果,以使其更加安全,更出色。

乳腺癌新辅助系统治疗后残留疾病的异质性
认识到辅助化学疗法的给药可以显着降低乳腺癌复发的风险,这引发了这种疾病治疗的巨大进步。1个内部的50年,化学疗法的摄影剂对乳腺癌亚型,基因组信号,基因组性特征和渗透性验证症状的鉴定,并鉴定出对乳腺癌的鉴定,并鉴定出对乳腺癌的鉴定。2,值得注意的是,amajorchangethathathathathathapcurredinthefield hastheMovementFromTheadJuvantJuvantUseofChemotherapy to NeoAdjuvant给药。的确,大多数患有ERBB2的患者 - 阳性(以前为HER2阳性)和三阴性乳腺癌(TNBC)atrecryterallythneoadjuvantsystemictheraphy be foreSurgery。3,而甲基依赖性胰蛋白酶adjungawayfromneoad- juvant全身治疗激素受体(HR) - 阳性疾病 - 使用多基因测定法,甚至可以鉴定出node-star-star-star-star-stal-stric-stric-阳性患者,这些患者无法从化学疗法中受益,

时空信息融合在船舶辅助系统故障检测中的应用
传感器融合一直是数据分析及其应用领域的焦点话题之一。个体传感信息通常用于揭示底层过程动态并识别其中的潜在变化。这些系统通常配备有(可能)不同模态的多个传感器。这些问题表明需要融合分布式和异构信息,以便实时准确推断关键系统的状态。为此,本文开发并验证了分布式物理过程(例如,船上辅助系统)中的故障检测和分类方法。文献中提出了几种传感器融合方法来解决故障检测问题,包括线性和非线性滤波器、自适应模型参考方法和基于神经网络的估计方案。然而,据作者所知,这些技术尚未应用于船载系统,因为存在一些固有的困难,包括:(可能)信号的非平稳行为、过程动态的潜在非线性、输入输出和反馈相互作用、多模态数据的缩放和对齐以及乘性过程噪声。上述一些问题可以在一定程度上简化或通过更简单的解决方案来近似。示例包括线性和线性化建模和贝叶斯估计技术(例如扩展卡尔曼滤波和粒子滤波)

时空信息融合在船舶辅助系统故障检测中的应用
传感器融合一直是数据分析及其应用的重点主题之一。个体传感信息通常用于揭示潜在的过程动态并识别其中的潜在变化。这些系统通常配备具有(可能)不同模态的多个传感器。这些问题表明需要融合分布式和异构信息,以便实时准确推断关键系统的状态。为此,本文开发并验证了分布式物理过程(例如,船上辅助系统)中的故障检测和分类方法。文献中提出了几种传感器融合方法来解决故障检测问题,包括线性和非线性滤波器、自适应模型参考方法和基于神经网络的估计方案。然而,据作者所知,这些技术尚未应用于船上系统,因为存在一些固有的困难,包括:(可能)信号的非平稳行为、过程动态的潜在非线性、输入输出和反馈相互作用、多模态数据的缩放和对齐以及乘性过程噪声。上述一些问题可以在一定程度上简化或通过更简单的解决方案来近似。例如线性和线性化建模和贝叶斯估计技术(例如扩展卡尔曼滤波和粒子滤波)[1][2]。研究人员还使用了软计算
时空信息融合在船舶辅助系统故障检测中的应用
传感器融合一直是数据分析及其应用的重点主题之一。个体传感信息通常用于揭示潜在的过程动态并识别其中的潜在变化。这些系统通常配备具有(可能)不同模态的多个传感器。这些问题表明需要融合分布式和异构信息,以便实时准确推断关键系统的状态。为此,本文开发并验证了分布式物理过程(例如,船上辅助系统)中的故障检测和分类方法。文献中提出了几种传感器融合方法来解决故障检测问题,包括线性和非线性滤波器、自适应模型参考方法和基于神经网络的估计方案。然而,据作者所知,这些技术尚未应用于船上系统,因为存在一些固有的困难,包括:(可能)信号的非平稳行为、过程动态的潜在非线性、输入输出和反馈相互作用、多模态数据的缩放和对齐以及乘性过程噪声。上述一些问题可以在一定程度上简化或通过更简单的解决方案来近似。例如线性和线性化建模和贝叶斯估计技术(例如扩展卡尔曼滤波和粒子滤波)[1][2]。研究人员还使用了软计算
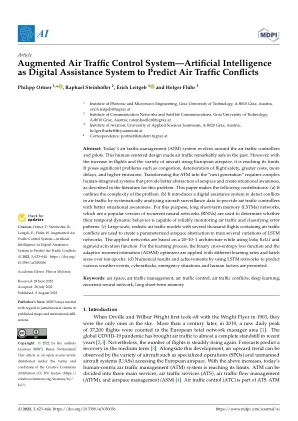
增强型空中交通管制系统——人工智能作为预测空中交通冲突的数字辅助系统
摘要:当今的空中交通管理 (ATM) 系统围绕空中交通管制员和飞行员发展。这种以人为本的设计在过去使空中交通非常安全。然而,随着航班数量的增加和使用欧洲空域的飞机种类的增加,它正在达到极限。它带来了严重的问题,例如拥堵、飞行安全性下降、成本增加、延误增加和排放量增加。将 ATM 转变为“下一代”需要复杂的人机集成系统,以提供更好的空域抽象并创建态势感知,正如文献中针对此问题所述。本文做出了以下贡献:(a) 概述了问题的复杂性。(b) 它引入了一种数字辅助系统,通过系统地分析飞机监视数据来检测空中交通中的冲突,从而为空中交通管制员提供更好的态势感知。为此,使用长短期记忆 (LSTM) 网络(一种流行的循环神经网络 (RNN) 版本)来确定其时间动态行为是否能够可靠地监控空中交通并对错误模式进行分类。 (c) 大规模、真实的空中交通模型(包含数千个包含空中交通冲突的航班)用于创建参数化的空域抽象,以训练 LSTM 网络的几种变体。所应用的网络基于 20-10-1 架构,同时使用泄漏 ReLU 和 S 形函数
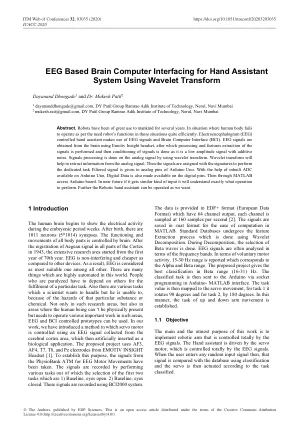
基于脑电图的脑机接口用于使用小波变换的手部辅助系统
摘要。多年来,机器人一直为人类带来巨大的用途。在人体无法按需求运作的情况下,机器人的功能在这些情况下非常有效。脑电图 (EEG) 控制的手部助手利用 EEG 信号和脑机接口 (BCI)。使用 Emotiv Insight 耳机从大脑获取 EEG 信号,然后对信号进行处理和特征提取,然后对信号进行调节,因为它是具有加性噪声的低幅度信号。使用小波变换对模拟信号进行信号处理。小波变换将有助于从模拟信号中提取信息。然后为信号分配签名以执行专用任务。滤波信号被提供给 Arduino Uno 的模拟引脚。借助 Arduino Uno 上内置的 ADC,数字数据也可在数字引脚上获得。然后通过 MATLAB 访问 Arduino 板。在不久的将来,如果它得到类似的输入,它将准确理解要执行什么操作。此外,机器人手部助手可以根据我们的需要进行操作。


使用人工智能辅助系统将运动学习原理带入现实世界的运动任务
摘要:人类自然地学习动作,但要达到运动技能的专家表现需要大量的时间和训练。在这篇评论中,我们展示了现代技术如何支持人们学习新的运动技能。首先,我们介绍了运动控制、运动学习和运动技能学习中的重要概念。我们还概述了用于人体运动分析的机器学习算法和传感器技术的快速扩展。运动学习原理、机器学习算法和最新传感器技术的结合有可能开发用于运动技能训练的人工智能引导辅助系统。我们对这种不同领域的整合给出了我们的观点,以便从实验室环境中的运动学习研究过渡到现实世界环境和现实世界的运动任务,并提出了一种分步方法来促进这种转变。
评估高级驾驶员辅助系统和自动驾驶汽车功能的培训方法:对用户心理模型和性能的影响
摘要:了解高级驾驶员辅助系统(ADA)和自动驾驶汽车(AV)技术的复杂性对于道路安全至关重要,尤其是关于驾驶员采用的问题。有效的培训是确保这些技术的安全和合格运行的关键因素。这项研究强调了训练方法在塑造驱动因素的心理模型中的关键作用,该方法定义为个人的认知框架,以理解和与ADAS和AV系统进行互动。他们的心理模型极大地影响了他们与这些技术的互动。已经对基于文本和基于视频的培训方法进行了比较分析,以评估他们对参与者的表现的影响以及其ADA和ADA和航空功能的心理模型的发展。性能是根据参与者在驱动模拟中与ADA和AV函数相互作用的准确性和反应时间的评估。调查结果表明,基于视频的培训产生了更好的表现成果,更准确的心理模型以及对参与者中ADAS功能的更深入的了解。这些发现对于政策制定者,汽车制造商和参与驾驶员培训的教育机构至关重要。他们强调了制定量身定制的培训计划的必要性,以促进日益复杂的汽车技术的熟练和安全运行。