XiaoMi-AI文件搜索系统
World File Search System运动控制


针对性深部脑刺激运动丘脑有助于皮质脊髓束损伤后的自主运动控制
1. 匹兹堡大学医学院,美国宾夕法尼亚州匹兹堡 2. 匹兹堡大学康复与神经工程实验室,美国宾夕法尼亚州匹兹堡 3. 匹兹堡大学物理医学与康复系,美国宾夕法尼亚州匹兹堡 4. 匹兹堡大学生物工程系,美国宾夕法尼亚州匹兹堡 5. 认知神经基础中心,美国宾夕法尼亚州匹兹堡 6. 匹兹堡大学神经外科系,美国宾夕法尼亚州匹兹堡 7. 匹兹堡大学神经科学系,美国宾夕法尼亚州匹兹堡 8. 匹兹堡大学神经生物学系,美国宾夕法尼亚州匹兹堡 (*) 共同第一作者 (**) 共同最后作者 大脑白质束病变阻止皮质脊髓下行输入有效激活脊髓运动神经元,导致无法治愈的肌肉麻痹。然而,在大多数情况下,皮质脊髓轴突的损伤是不完整的,神经技术可以增强幸存的连接以恢复运动功能。我们在这里假设,通过直接与皮质脊髓运动神经元建立兴奋性连接,运动丘脑的深部脑刺激 (DBS) 可以促进幸存的皮质脊髓纤维的激活,改善瘫痪肢体的运动。我们首先在猴子身上确定了最佳刺激目标和参数,这些目标和参数可以增强手臂、手和面部肌肉的运动诱发电位以及握力。这种增强作用在脑白质病变后仍然存在。然后,我们通过确定相应的最佳丘脑目标 (VIM/VOP 核) 将这些结果转化为人类受试者,并复制了在猴子身上获得的结果。最后,我们设计了一种 DBS 方案,可以立即改善慢性创伤性脑损伤患者的自主握力控制。我们的结果表明,针对运动丘脑的 DBS 可能成为治疗运动瘫痪的有效方法。引言中风或脑外伤 (TBI) 会导致皮质脊髓束 (CST) 损伤,破坏皮质与下运动中枢之间的通讯,导致面部、上肢或下肢肌肉功能丧失 1-4 。由此产生的上肢运动障碍仅在美国就严重影响了大约 1000 万人的生活质量 5,6 。强化物理治疗仍然是唯一的常规干预措施,但疗效有限,特别是对于中度至重度轻瘫患者 7,8 。在大多数情况下,CST 的损伤是不完全的。然而,保留的兴奋性下行连接不足以激活脊髓运动神经元,导致功能性运动轻瘫 9-11 。促进残留皮质脊髓轴突的激活可以重建运动神经元的

四倍的机器人控制:使用身体平面运动控制,腿阻抗控制和贝齐尔曲线
摘要:在机器人技术中,已经证明了四足机器人在工业,采矿和灾难环境中执行任务的能力。为了确保机器人安全执行任务,其脚部位置的细致计划和精确的腿部控制至关重要。四足机器人的传统运动计划和控制方法通常依赖于机器人本身及其周围环境的复杂模型。建立这些模型由于其非线性性质可能会具有挑战性,通常需要大量的计算资源。但是,存在一种更简化的方法,该方法着重于机器人浮动基础进行运动计划的运动学模型。这种简化的方法更易于实现,但也适用于更简单的硬件配置。将阻抗控制纳入腿部运动是有利的,尤其是在穿越不平坦的地形时。本文提出了一种新颖的方法,其中四足机器人对每条腿采用阻抗控制。它利用六度的贝齐尔曲线来生成从平面运动模型中用于身体控制的腿部速度的参考轨迹。该方案有效地指导机器人沿预定义的路径。使用机器人操作系统(ROS)实施了拟议的控制策略,并通过GO1机器人的模拟和物理实验进行验证。这些测试的结果证明了控制策略的有效性,使机器人能够跟踪参考轨迹,同时显示稳定的步行和小跑步态。
揭示了经颅直流刺激在增强躯干运动控制和脑血管事故幸存者平衡方面的潜力:
解锁经颅直流电流刺激(TDC)的潜力增强脑血管事故(CVA)幸存者的平衡控制和平衡一直是最近文献的焦点。这是一种非侵入性脑刺激,可用于促进CVA幸存者中神经可塑性的皮质运动兴奋性。这篇评论深入研究了最近发布的工作,从2014年到2023年,搜索了五个著名的英语研究数据库。审查了八篇文章。TDCS在刺激皮质运动兴奋性和促进CVA幸存者中的神经可塑性方面表现出了希望,但其专门针对躯干控制和BALCE的应用仍然很少。尽管如此,证据表明,CVA后平衡控制中值得注意的增强,尤其是将TDC与其他干预措施(包括功能性电刺激和平衡训练)结合起来的干预措施。本评论阐明了TDC的潜力,即独立或与常规物理疗法集成,以强化CVA幸存者之间的躯干控制。马来西亚医学与健康科学杂志(2024)20(SUPP10):291-301。 doi:10.47836/mjmhs.20.s10.33马来西亚医学与健康科学杂志(2024)20(SUPP10):291-301。 doi:10.47836/mjmhs.20.s10.33
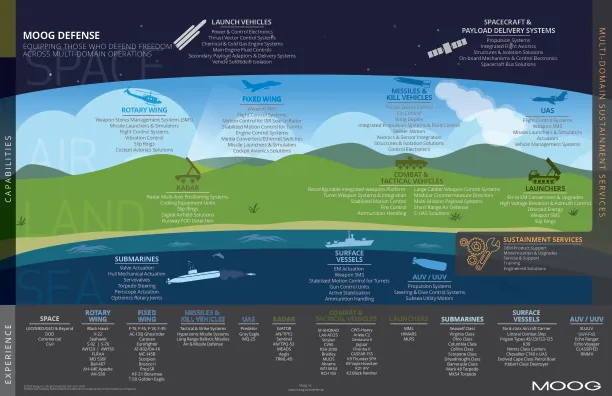
Moog Total Support - 国防保障手册
Moog Inc. 是一家全球精密运动控制产品和系统的设计商、制造商和集成商。在过去 70 年中,我们因提供最具挑战性的运动控制应用的创新解决方案而享有盛誉。因此,我们已成为世界领先的多领域车辆制造商的主要供应商,并应用于无数军事平台,为客户提供可靠的系统和支持。Moog Total Support 还为数千种商业应用提供维护和售后服务。

社论:脑振荡活动在人类感觉运动控制和学习中的作用:桥接理论与实践
神经振荡,自发发生以及大脑从事任务的振荡活动的节奏模式,在功能网络内部和跨功能网络的神经交流中起着至关重要的作用。在感觉运动网络中,MU(8-13 Hz)中的振荡,β(13.5-25 Hz)和γ(30-90 Hz)频率范围通常会锁定为运动开始时,并且在逐渐振幅(desynchroncrization)中逐渐降低(ERNCHRONING)(ERCHRORINCER)(ERCHRORCH)(ERCHRORCH)(ERCHRORCH)(ERNCHRORIAN)的特征(ERNCHRORINCER)(ERNCH)(ERNCRORIN)(ERNCRORINCERNINCERRORN)(ERNCRORCH)(EVENTRORIN)(EVENTRORIN)。尽管他们的功能作用仍在争论中,但MU,Beta和γ振荡在几种神经精神病学条件下发生了改变(Peter等,2022),并被认为与感觉运动控制,学习和可塑性有关(Pfurtscheller and Lopes da Silva da Silva,1999; 1999; Engel and Frard; ghillies; ghillies; ghillies;该研究主题展示了有关皮质振荡在运动控制和学习中的作用以及这种知识的转化适用性的研究。它包含涉及实验和方法研究和文献综述的五篇文章。
计量系统的设备级接口规范的分布式测试
软件测试已成为软件质量的关键。然而,接口规范开发工作通常将测试视为可有可无。我们主张在标准化过程之前,尽早并严格地将测试应用于规范开发和实施。接口规范开发的目标是在接口上创建一种被广泛接受的通用(或中性)语言,而通用语言的目标是系统互操作性。因此,在介绍之后,我们将简要描述互操作性问题以及为什么需要通用语言。我们将研究双向接口两侧的以下系统:一侧是应用软件,另一侧是实时逻辑和运动控制设备。该设备是坐标测量机 (CMM),由设备控制软件(用于逻辑和运动控制)、运动控制硬件、传感器和执行器组成。应用软件执行许多操作,包括与 CMM 操作员接口、以高级语言解释检查程序、分析传感器数据以及根据低级感测数据估计高级特征。
设备级接口的分布式测试... - NIST 的 TSAPPS
软件测试已成为软件质量的关键。但是,接口规范开发工作通常将测试视为非必要的。我们主张在标准化过程之前,尽早严格地将测试应用于规范开发和实施。接口规范开发的目标是在接口上创建一种被广泛接受的通用(或中性)语言,而通用语言的目标是系统互操作性。因此,在此介绍之后,我们将简要描述互操作性问题以及为什么需要通用语言。我们将在双向接口的任一侧研究以下系统:一侧是应用软件,另一侧是实时逻辑和运动控制设备。该设备是一台坐标测量机 (CMM),由设备控制软件(用于逻辑和运动控制)、运动控制硬件、传感器和执行器组成。应用软件执行许多操作,包括与 CMM 操作员接口、用高级语言解释检查程序、分析传感器数据以及从低级感测数据估计高级特征。
计量系统的设备级接口规范的分布式测试
软件测试已成为软件质量的关键。然而,接口规范开发工作通常将测试视为可有可无。我们主张在标准化过程之前,尽早并严格地将测试应用于规范开发和实施。接口规范开发的目标是在接口上创建一种被广泛接受的通用(或中性)语言,而通用语言的目标是系统互操作性。因此,在介绍之后,我们将简要描述互操作性问题以及为什么需要通用语言。我们将研究双向接口两侧的以下系统:一侧是应用软件,另一侧是实时逻辑和运动控制设备。该设备是坐标测量机 (CMM),由设备控制软件(用于逻辑和运动控制)、运动控制硬件、传感器和执行器组成。应用软件执行许多操作,包括与 CMM 操作员的接口、以高级语言解释检查程序、分析传感器数据以及根据低级感测数据估计高级特征。