XiaoMi-AI文件搜索系统
World File Search System适用性

评估凝胶和干电极以进行脑电图测量,以比较其对人类多模式工作负载检测的适用性
知道在某些任务中,一个人的总体工作量水平在不同领域很有帮助。为预防精神障碍,例如由于永久性压力和超负荷而倦怠,知道一个人的整体工作量水平(Greif&Bertino,2022)是一个优势,因为过去的精神障碍趋势(世界卫生组织,2023年,2023年),必须尽可能地避免这种情况。尤其需要在工作量方面更好地监控安全 - 关键环境,以保护在其中工作的人。例如,在太空飞行中,重要的是要了解每个宇航员的工作量水平,因为更高的工作量水平与犯错的风险更高有关(Morris&Leung,2006年),这可能会迅速致命地结束。此外,由于宇航员一般不使用宇航员,因此ISS和太空中的微重力(ESA,2023)可能会影响整体工作量。Wickens(2008)的多重资源模型定义了影响工作负载的不同维度。微重力的对象的行为与地球重力中的物体显着不同。因此,视觉处理和特殊活动消耗了更多资源,因为宇航员会看到行为
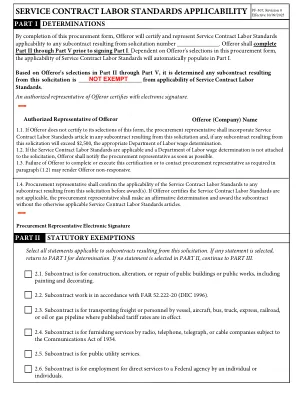
服务合同劳动标准适用性PF-307,修订0有效10/09/2023第一部分确定
6.1。工资确定是确定根据41 U.S.C.6703或6707(c)适用于一类或多个分包商服务人员的特定地点的最低工资或附带福利。6.2。美国是50个州,哥伦比亚特区,波多黎各,北部玛丽安娜群岛,美国萨摩亚,关岛,美国维尔京群岛,约翰斯顿岛,威克岛和外大陆架,如《外大陆架外货架法》(43 U.S.C.1331,ETSEQ。),但不包括受美国管辖权或外国任何美国基地或财产约束的任何其他地方(29 CFR 4.112)。6.3。服务分包合同超过$ 2,500,应包含有关最低工资和附加福金,安全和卫生工作条件的强制性规定,向分包商的最低允许赔偿的通知以及同等的联邦雇员分类和工资率。根据41 U.S.C.6707(D),服务分包合同不得超过5年。6.4。分包商以超过$ 2,500的价格进行服务分包商,没有任何前身分包商的集体谈判协议适用其雇员,至少劳动部发现的工资和附带福利以在当地占上风,或者在没有工资确定的情况下,在公平的工党劳动标准中所设定的最小工资。6.5。此类分包通常以小时(人工加材料和零件)为基础开具发票。任何分包合同主要用于此类工作,均受服务合同劳动标准法规的约束。重制造不包括维修受损或破损的设备,不需要完全拆除,大修和重建,或定期维护,保存,保存,护理,调整,保养,保养或维修此类设备,以使其保持可用,可用,可提供的工作顺序。

使一件好事更好:扩大自动胰岛素输送系统的访问和适用性,使所有1型糖尿病的青年受益
晚期糖尿病技术,例如胰岛素泵,连续的葡萄糖监测(CGM)和自动胰岛素de剂(AID),已彻底改变了1型糖尿病护理,从而在水gly和质量中产生了显着的证明(1)。对于小儿1型糖尿病,这种积极影响扩展到整个父母,监护人,看护人和家庭单位(2)。AID系统广泛地促进了实时CGM数据与基于自动算法的胰岛素传递的整合,从而导致糖尿病相关的短期和长期结果的逐步改善。辅助用途与糖尿病管理负担减轻和糖尿病结局的全球改善相关。尽管糖尿病技术有效率,但使用的差异越来越多(3-6)。在其最基本的定义中,差异是获得有效的干预措施的不平等。在小儿疾病中,征用糖尿病技术的访问和使用是关键差异(5-7)。在本期《糖尿病护理》中,Zeng等。 (8)提出了1,300多名参与者的荟萃分析,这些参与者在25名外患者随机对照试验(RCT)中进行了比较,将AID与常规治疗进行了比较。 一个关键优势,作者选择在本期《糖尿病护理》中,Zeng等。(8)提出了1,300多名参与者的荟萃分析,这些参与者在25名外患者随机对照试验(RCT)中进行了比较,将AID与常规治疗进行了比较。一个关键优势,作者选择
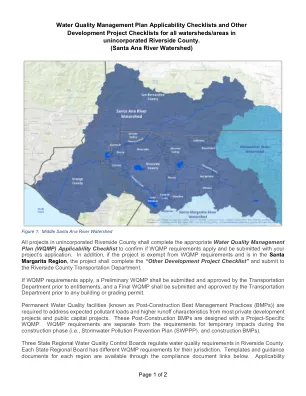
适用于非建制河滨 C 所有流域/区域的水质管理计划适用性检查表和其他开发项目检查表
重大重建:在已开发的场地上增加或更换 5,000 平方英尺或以上的不透水表面。不包括为维护原有线路和坡度、水力容量、已建设施的原用途而进行的日常维护活动,也不包括为保护公众健康和安全而进行的紧急重建活动。新建的开发项目会创建 10,000 平方英尺或以上的不透水表面(整个项目场地的总体面积),包括商业和工业项目以及需要最终地图的住宅小区(即独立的单户住宅小区、多户相连的小区、公寓或公寓等);混合用途和公共项目(不包括许可证持有人的道路项目)。此类别包括公共和私人土地上的开发,这些开发属于共同许可证持有人的规划和建设权力。汽车修理厂(标准行业分类 (SIC) 代码 1 5013、5014、5541、7532、7533、7534、7536、7537、7538、7539)。
Medicare药物价格谈判计划:修订指南,第1191 - 1198节的《社会保障法》的初始价格适用性2026年
第11001(c)和11002(c)第11002条(IRA)指导秘书通过计划指导或其他形式的计划指导实施2026、2027和2028的Medicare Prient Price谈判计划(以下简称为“谈判计划”)。根据法律,2023年3月15日,CMS发布了初始备忘录,以实施2026年初始价格适用性的谈判计划。CMS还自愿对初始备忘录的许多关键方面征求意见。最初备忘录的30天评论期开始于2023年3月15日,并于2023年4月14日结束。CMS收到了最初备忘录的7,500多封评论,代表了学术专家和思想领导者,消费者和患者组织,数据供应商/软件技术实体,卫生保健提供者,卫生保健提供者,卫生系统,个人,个人,劳动力,制药和生物技术

免疫检查点抑制剂治疗肝细胞癌以及一线阿替利珠单抗/贝伐单抗在现实生活中的适用性
1 消化科,内科,IRCCS—Ospedale Policlinico San Martino,热那亚大学,16132 热那亚,意大利; mariacorina.plaztorres@edu.unige.it 2 肝胆和器官移植科,罗马翁贝托一世综合诊所,罗马萨皮恩扎大学,00185 罗马,意大利; quirino.lai@uniroma1.it 3 IRCCS Azienda Ospedaliero—Universitaria di Bologna,医学和外科科学系内科科室,40138 Bologna,意大利; fabio.piscaglia@unibo.it 4 胃肠病科,贝尔科勒医院,01100 维泰博,意大利; e.caturelli@tiscali.it 5 巴勒莫大学健康促进、母婴保健、内科和医学专业(PROMISE)系胃肠病学和肝病学部,意大利巴勒莫 90133;giuseppe.cabibbo@policlinico.pa.it 6 帕尔马大学医院传染病和肝病学部,意大利帕尔马 43126;ebiasini@ao.pr.it 7 帕多瓦大学外科、肿瘤学和胃肠病学系胃肠病学部,意大利帕多瓦 35128;filippo.pelizzaro@unipd.it 8 佛罗伦萨大学实验和临床医学系内科和肝病学部,意大利佛罗伦萨 50134; fabio.marra@unifi.it 9 医学符号学组,医学和外科科学系,IRCCS Azienda Ospedaliero—Universitaria di Bologna,40138 Bologna,意大利; franco.trevisani@unibo.it * 通讯:egiannini@unige.it;电话:+39-010-353-7950;传真:+39-010-353-8638
在不影响空间规划灵活性的情况下实现医疗建筑楼面振动适用性极限 MF Harrison Buro Happold,
“医疗建筑”一词通常包括医院、治疗中心以及支持这些建筑的科学实验室建筑。本文的重点是那些需要高可用性的建筑,这意味着无论外部因素如何,建筑及其设施都应保持充分和适当的使用。在地震、飓风和台风多发地区,安全性和可用性是重叠的。手术室在此类事件期间或至少在事件发生后不久是否仍可用于护理受影响的患者?入住该建筑是否安全?事件期间的地板振动水平是否可用并允许安全使用精细的操作程序?此类建筑对其服务的人群也很重要。它们需要很长时间来规划,建造成本高昂。它们配备了广泛的空气处理、临床气体、烟雾提取和其他设备,服务水平很高。它们的使用寿命通常至少为 60 年,而且鉴于医学的快速变化,在建筑物使用寿命的最后几年中进行的许多程序将与早些年的程序大不相同。因此,这些建筑往往采用坚固的混凝土框架、平板、宽柱距、间隙厂房楼层(多层建筑中专门用于厂房的整个楼层),以便随着未来需求的变化,可以完全重新规划空间。ISO 2394 从可靠性(结构在其设计使用寿命内满足规定要求的能力 1 )方面设定了建筑结构工程的总体性能要求。可靠性涵盖安全性(结构或结构构件避免超过极限状态的能力)、适用性(结构或结构构件在所有预期作用下在正常使用条件下充分发挥性能的能力)和耐久性(通过计划维护,在规定时间内达到设计性能)。在大多数情况下,适用性问题占据了结构工程师和支持他们的振动专家的注意力。对于医疗保健建筑,不同的地板振动适用性限制适用于不同的活动,其中最严格的是对振动最敏感的设备(通常是提供高倍放大医学成像或机器人操作的设备)。1.2 地板振动适用性限制

文章根据静息状态脑电图数据预测个体用户脑电图特征的动态范围,以评估其对被动脑电图的适用性——
摘要:随着近年来低成本可穿戴脑电图 (EEG) 记录系统的发展,被动式脑机接口 (pBCI) 应用正在教育、娱乐和医疗保健等各种应用领域中得到积极研究。各种 EEG 特征已被用于实现 pBCI 应用;然而,经常有报道称,有些人难以充分享受 pBCI 应用,因为他们的 EEG 特征的动态范围(即其随时间变化的幅度)太小,无法用于实际应用。进行初步实验以寻找与不同心理状态相关的个性化 EEG 特征可以部分避免这一问题;然而,对于大多数 EEG 特征动态范围足够大以用于 pBCI 应用的用户来说,这些耗时的实验是没有必要的。在本研究中,我们尝试从静息状态脑电图 (RS-EEG) 预测个人用户最广泛用于 pBCI 应用的脑电图特征的动态范围,最终目标是识别可能需要额外校准才能适合 pBCI 应用的个人。我们使用基于机器学习的回归模型来预测三种广泛使用的脑电图特征的动态范围,已知这三种特征与大脑的效价、放松和集中状态有关。我们的结果表明,脑电图特征的动态范围可以预测,归一化均方根误差分别为 0.2323、0.1820 和 0.1562,证明了使用短暂静息脑电图数据预测 pBCI 应用的脑电图特征的动态范围的可能性。

耕作实践,品种偏好和土地适用性分析,用于东部D.R.的山药生产刚果:对育种计划和食品主权的影响
YAM(Dioscorea spp。) 是撒哈拉以南非洲(SSA)的主要块茎作物,具有缓解贫困,食品主权和营养安全的巨大潜力。 利用其全部潜力要求将其降低的因素被理解和减轻。 这项研究是在2022年5月至2023年7月之间进行的,评估了刚果民主共和国(DRC)的山药耕作实践,品种偏好和土地适用性。 我们采访了四个农业生态区(AEZ)内的765名小农户,以评估影响山药生产的社会文化,农艺,品种和生物物理因素。 使用分析层次结构过程(AHP)进行了土地适用性分析,以识别适合广泛山药生产的区域以及可以优化山药品种选择和测试的聚类环境。 结果表明,山药主要由刚果民主共和国东部的妇女培养(70%)。 种子输送系统是非正式的,主要依靠农民储备的种子和农民种子交易所(74.9%)。 Soil depletion (68.3%), limited access to high-quality seeds (54.5%), youth disengagement in yam value chain (50.3%), insect pests (17.9%), and short tuber shelf-life (65.8%) were, respectively, the main ecological, agronomic, sociocultural, biological, and tuber quality factors hindering yam production in eastern DRC. 但是,大多数因素的重要性与农民性别和年龄类别有很大不同。 土地适用性分析了五个群集的区分;该地区最重要的部分属于合适的(27%),高度适合(24%)和非常合适的类(37%)。YAM(Dioscorea spp。)是撒哈拉以南非洲(SSA)的主要块茎作物,具有缓解贫困,食品主权和营养安全的巨大潜力。利用其全部潜力要求将其降低的因素被理解和减轻。这项研究是在2022年5月至2023年7月之间进行的,评估了刚果民主共和国(DRC)的山药耕作实践,品种偏好和土地适用性。我们采访了四个农业生态区(AEZ)内的765名小农户,以评估影响山药生产的社会文化,农艺,品种和生物物理因素。使用分析层次结构过程(AHP)进行了土地适用性分析,以识别适合广泛山药生产的区域以及可以优化山药品种选择和测试的聚类环境。结果表明,山药主要由刚果民主共和国东部的妇女培养(70%)。种子输送系统是非正式的,主要依靠农民储备的种子和农民种子交易所(74.9%)。Soil depletion (68.3%), limited access to high-quality seeds (54.5%), youth disengagement in yam value chain (50.3%), insect pests (17.9%), and short tuber shelf-life (65.8%) were, respectively, the main ecological, agronomic, sociocultural, biological, and tuber quality factors hindering yam production in eastern DRC.但是,大多数因素的重要性与农民性别和年龄类别有很大不同。土地适用性分析了五个群集的区分;该地区最重要的部分属于合适的(27%),高度适合(24%)和非常合适的类(37%)。多种品种特征用于评估东刚果民主共和国的山药品种,尽管在中年成年女性中,块茎的口味(59%)是最有价值的特征,尽管它的性别和年龄类别最高。我们进一步讨论了如何提供山药品种,适合当地生产商和最终用户的需求的繁殖计划,可以释放该作物增强刚果民主共和国粮食安全和财富创造的潜力。这项研究的土地适用性图是定义广泛的山药生产以及品种选择和测试的优先领域的宝贵决策工具。这项研究提供了有关影响山药生产的因素的宝贵见解,并建议
国防后勤局
回复:MIL-PRF-38535 和 MIL-STD-883 的实验室适用性;FSC 5962;VQC-22- 037042,控制编号:080612 Micross Components Orlando (MCO) 已向 DLA Land and Maritime 证明其符合 MIL-PRF-38535 和 MIL-STD-883。Micross 已获得实验室适用性认证,适用于外壳上显示的设施、测试方法和条件。此实验室适用性认证取代了之前的实验室适用性认证、DLA Land and Maritime-VQC-18- 032473。此实验室适用性认证还涵盖了 Micross 的商业实验室适用性认证。所有测试必须按照 MIL-PRF-38535 和 MIL-STD-883 测试方法进行。为了保持商业实验室的适用性,您需要编制一份保留报告,提交给 DLA Land and Maritime-VQC,其中包含根据 MIL-PRF-38535 和 MIL-STD-883 的要求进行测试的所有设备,如下所示: