XiaoMi-AI文件搜索系统
World File Search System速度控制

使用Raspberry Pi 的基于物联网的车辆安全和安全系统 ... 的面积有效的通用加密处理器 农业的新兴趋势-IJNRD 人工智能在SEO中的作用 使用机器学习的自动驾驶汽车模拟 标题: - “吡啶:综合,瑞士和应用。” 使用机器学习模型预测孕产妇的健康风险并比较 利用药房实践中的人工智能和... 人类活动识别系统 对微球的评论:类型,配方方法,... 医疗保健中的AI驱动数据安全 聊天机器人对已知的个人prakriti(... 使用Python 的对象检测OPENCV Jetir Research Journal
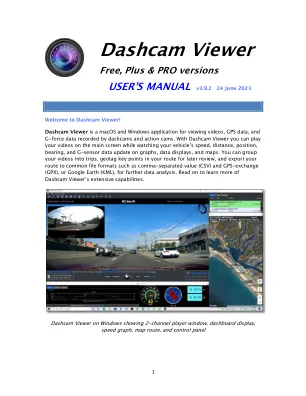
该提案提出了一个高级的综合车辆安全和安全系统,该系统准确地解决了这两个方面。现有系统通常专注于安全或保障措施,而不是合并的解决方案。拟议的系统包含了基于面部识别的安全授权和一个超声波传感器,以监视车辆移动以提高安全性。通过整合这些关键组件,该系统旨在提供全面的解决方案,通过面部认证来增强车辆安全性,同时通过障碍物检测和速度控制机制降低事故的风险。这种用于车辆安全和保障的综合方法区分了拟议的系统,提供了一个整体解决方案,以应对该领域的关键挑战。

沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。

《安全第一》杂志 - 第 16 期 - SKYbrary
RNP 允许在以前无法设想仪表进近的环境中设计 IFR 程序。RNP 进近特别适合(但不限于)在具有挑战性的区域(例如山区)的进近,并可替代大多数现有的盘旋进近。与目视进近和盘旋进近相比,RNP 进近的轨迹是可预测的。这增强了进近的准备和简报。此外,它还有助于态势感知和决策。在横向和垂直方向上以及速度控制方面完全管理这些进近,使整个进近过程中的能量管理变得容易。如果需要,RNP 进近还可以确保更简单地进入计划的复飞轨迹剖面。这一直是循环方法的一个“困难”方面。
沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。
电气工程硕士,专业为电力电子和……
EEE G541 配电设备和配置 [3 2 5] 消费者端配电装置的基本配置。变压器类型、规格、性能、保护和尺寸。电缆和绝缘层的类型、电缆参数、载流量和保护。低压开关设备的额定值及其在选择、开关瞬态和清除时间中的应用。保险丝的属性(以载流量为参考)。仪表、仪器变压器及其应用。配电层的电压控制。电能质量功率因数、频率和谐波含量的基本概念 EEE G542 电力电子转换器 [3 2 5] 转换器的重要性在于它是电源和负载之间的接口。DC-DC 转换器:降压、升压和降压-升压配置。ACDC 转换器:单相和三相二极管和晶闸管转换器。晶闸管转换器中的逆变和线路换向逆变器的应用。 DCAC 转换器:单相和三相开关模式电压源逆变器、不同类型的 PWM 操作、多级 VSI 操作、空间矢量调制技术。AC-AC 转换器:晶闸管供电交流负载、循环换流器。矩阵转换器阵列及其作为 DC-DC 和 DC-AC 转换器的操作。EEE G543 功率器件微电子学与选择 [ 3 0 3] 功率器件封装的热特性、R θJC 和 R θCS 的问题、热流及其对器件温度的影响、散热器设计和选择。双层结行为、漂移区的概念、功率二极管的特性。厚膜 BJT 中的基极操作、稳态特性、开启和关闭时间、多级功率达林顿。四层结行为、晶闸管的两个晶体管模型、四层结器件的动态模型。GTO 晶闸管、四层结器件的关闭机制、当前的技术问题。 MOS 的工作原理和特性、功率 MOSFET 的特性和结构。MOSFET 到 IGBT 的发展、技术优势、特性和动态行为。绝缘栅技术的当前技术问题。矩阵转换器简介。EEE G545 电力电子系统控制与仪表 [3 0 3] 参考电力电子转换器的调节和控制问题。反馈转换器模型:基本转换器动态、快速切换、分段线性模型、离散时间模型。DC-DC 转换器的电压模式和电流模式控制、整流器系统的比较器控制、比例和比例积分控制应用。基于线性化的控制设计:传递函数、补偿和滤波、补偿反馈控制系统。滞后控制基础知识以及在 DC-DC 转换器和逆变器中的应用。一般边界控制:边界附近的行为以及合适边界的选择。模糊控制技术的基本思想和性能问题。电力电子电路传感器、速度传感器和扭矩传感器。EEE G552 固态硬盘 [3 2 5] 驱动系统简介:要求、组件和基准;电机理论回顾;电机的电力电子控制:要求和操作问题;感应电机的静态速度控制:交流电源控制器、滑差能量回收、VSI 和 CSI 控制的感应电机;同步电机和相关机器的速度控制;直流电机速度控制问题:整流器和斩波控制器;先进的感应电机驱动控制:矢量控制,

定位器和控制器 - MVG World
Orbit/FR 在设计和制造先进天线定位子系统方面拥有 30 多年的经验,现在将其专业知识贡献给微波视觉集团 (MVG),扩展其专业知识并参与全系列天线测试和测量解决方案。今天,作为 MVG 的一部分,它继续发展和创新,以满足日益无线和电子驱动的世界的测试需求。从原始定位系统的传统到我们新的低调紧凑系列,MVG 继续推出采用最先进技术的优质工程产品,以确保高级、精确的机械运动、旋转和速度控制。这一广泛的产品组合为客户提供了航空航天和国防、电信和汽车行业以及天线研发领域各种应用的交钥匙解决方案。
DX5e 快速入门指南 - 康拉德电子
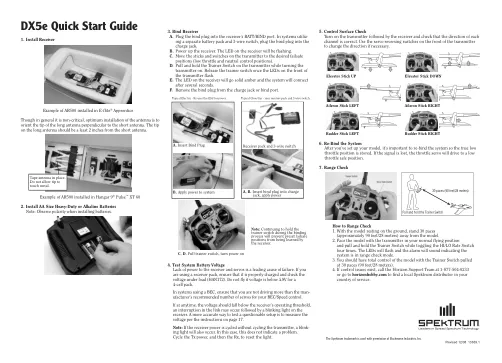
4.测试系统电池电压 接收器和伺服器缺电是导致故障的主要原因。如果您使用的是接收器组,请确保其已正确充电并检查负载下的电压(HAN172)。如果 4 节电池组的电压低于 4.8V,请勿飞行。在使用 BEC 的系统中,确保您驱动的 BEC/速度控制伺服器数量不超过制造商推荐的数量。如果电压在任何时候低于接收器的工作阈值,则可能会发生链路中断,随后接收器上的指示灯闪烁。测试可疑设置的更准确方法是按照第 17 页的说明测量电压。注意:如果在不循环发射器的情况下循环接收器电源,也会出现闪烁的灯光。在这种情况下,这并不表示存在问题。循环 Tx 电源,然后循环 Rx,以重置灯光。
产品表 HRV Solo 2.4.indd - 新鲜空气通风系统
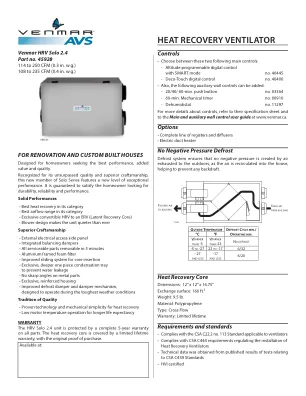
• 型号:HRV Solo 2.4 • 外壳:预涂钢 • 风扇速度控制: • 零件编号:45928 • 绝缘:1 英寸铝箔贴面玻璃纤维 - 低速、增低速和高速 • 总组装重量(包括 • 安装:链条和弹簧悬挂 - 用户聚丙烯芯有两种速度可供选择):73 磅。- 选择低速或增低速 • 圆形端口;适合 6 英寸圆形管道 • 供气和排气鼓风机电机:安装时 • 排水管:1/2 英寸配件,带 10 英尺 PVC 排水管 - 轴承:套筒轴承 - 类型:PSC • 装置电气特性: • 过滤器:2 个可清洗 30 ppi 网状泡沫 伏特 频率 安培 瓦特 11.75” x 16.75” x 0.75” 120 60 Hz 1.9 202

D6R 系列 III 履带式推土机的规格,AEHQ5655,10198172.qxd
差速转向系统。差速转向在转弯时保持对两条履带的动力。当一条履带加速而另一条履带减速相同量时,拖拉机转弯。操作员可以同时转向和控制变速箱,这可以在某些应用中减少循环时间。差速转向舵杆具有用于升档和降档的触摸换档按钮。舵杆本身可以轻松向前或向后旋转以改变相应的拖拉机方向。向前移动可将拖拉机转向左侧,向后拉可向右移动。低舵杆力确保操作员在长时间换档期间感到舒适。大型铲刀负载可以绕过建筑物、桥台、树木或其他障碍物。转向调制也针对这些应用中的精确控制进行了优化。由于两条履带在转弯时均有动力,因此在陡坡上的软地面条件下可以实现更大的负载能力、功率和速度控制。