XiaoMi-AI文件搜索系统
World File Search System闭壳

OrbNet-Spin:基于量子力学的开壳系统几何深度学习
现代量子化学方法涉及准确性和计算成本/复杂性之间的权衡。作为替代方案,深度学习方法被用作捷径,以较小的计算复杂性创建准确的预测。事实证明,此类模型在预测闭壳系统(其中所有电子都是成对的)方面非常有效。然而,尽管开壳系统(其中存在未配对电子)在描述自由基和反应中间体等物种方面非常重要,但很少有人关注它们。我们介绍了基于 OrbNet-Equi 的 OrbNet-Spin,这是一种几何和量子感知的深度学习模型,用于在电子结构级别表示化学系统。OrbNet-Spin 将自旋极化处理融入底层半经验量子力学轨道特征化中,并在保持几何约束的同时相应地调整模型架构。OrbNet-Spin 可以准确描述闭壳和开壳电子结构。我们使用开壳层卡宾的 QMSpin 数据集验证了 OrbNet-Spin 的性能,实现了单线态和三线态卡宾均低于化学精度的平均绝对误差。
双壳油船通用结构规则
1.1.1.3 本规范生效前签订建造合同的船舶应符合各船级社的规范。注:“签订建造合同”日期系指未来船东与造船厂签订船舶建造合同的日期。有关“签订建造合同”日期的更多详细信息,请参阅 IACS 程序要求 (PR) 第 29 条。
双壳油船通用结构规则
1.1.1.3 本规范生效前签订建造合同的船舶应符合各船级社的规范。注:“签订建造合同”日期系指未来船东与造船厂签订船舶建造合同的日期。有关“签订建造合同”日期的更多详细信息,请参阅 IACS 程序要求 (PR) 第 29 条。

石膏壳内的内蒸发微生物垫
摘要:我们对以色列埃拉特高盐度盐场池塘(盐度 280 至 290 g 1-0)底部石膏壳内发育的蓝藻和紫色细菌分层群落进行了描述。石膏壳厚 4 至 5 厘米,上部 1 至 2 厘米处栖息着富含类胡萝卜素的单细胞蓝藻(Aphanothece sp. 等),使石膏呈现橙棕色。在棕色层下面,发现了一个绿色层,主要由 Synechococcus 属的单细胞蓝藻组成,丝状 Phormidjum 型蓝藻是次要成分。在这些产氧光养生物层下面是一层红色的紫色细菌层。我们研究了石膏壳的光学特性,通过表征不同层中存在的色素并测量光谱标量使用光纤微探针测量地壳不同深度的辐射度。在地壳上部 2 毫米处,测量到的最大标量辐射度高达入射光的 200%。光谱蓝色范围(400 至 500 纳米)的光被上部棕色层中的保护性胡萝卜素(蓝黄素、海胆酮等)有效吸收。然而,光谱红色部分中大量的光穿透到绿色层,从而实现光合作用:620 和 675 纳米处约 1% 的入射辐射度到达深度为 15 毫米的绿色层,光谱红外部分中 >1% 的入射光到达深度为 20 至 23 毫米的紫色细菌。
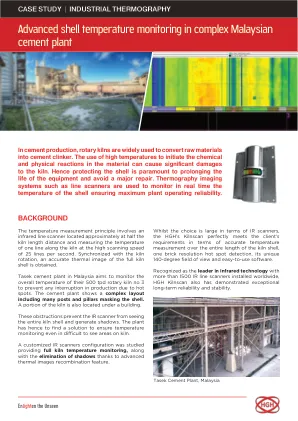
Tasek 水泥厂窑壳温度 - ...
阴影区域监测 第一个 Kilnscan 具有黄色视野,用于测量位于建筑物内部的窑炉部分的温度。可以注意到扫描仪与窑壳之间的距离仅为 4.3 米。由于 140° 视野扫描仪,实现了这一短瞄准距离限制。第二个和第三个扫描仪旨在扫描窑壳的同一部分,并特别解决沿着窑炉这一部分延伸的阴影区域问题。然后通过结合这两个扫描仪的数据重建热图像,消除阴影,从而完美地全面监测窑壳。
带 Haloring 的 D-Sub 轻型后壳
D-Sub 轻型后壳是保护重量和空间受限的太空应用中的连接器和电缆的关键元件。我们现在提供兼容 Haloring 的 D-Sub 轻型后壳新版本,可满足客户在需要屏蔽的应用中的需求。

Mesogan:生成神经反射率壳
摘要我们介绍了Mesogan,这是一种生成3D神经纹理的模型。通过结合生成对抗网络(stylegan)和体积神经场渲染的优势,这种新的图形原始形式代表了中尺度的出现。原始性可以用作神经反射率壳的表面;表面上方的薄体积层,其外观参数由神经网络定义。为了构建神经外壳,我们首先使用带有仔细随机傅立叶特征的stylegan生成2D特征纹理,以支持任意尺寸的纹理而无需重复伪影。我们以学习的高度功能增强了2D功能纹理,这有助于神经场渲染器从2D纹理产生体积参数。为了促进过滤,并在当前硬件的内存约束中启用端到端培训,我们使用了层次结构纹理方法,并将模型训练在3D中尺度结构的多尺度合成数据集上。我们提出了一种在艺术参数上调节Mesogan的可能方法(例如,纤维长度,链的密度,照明方向),并演示并讨论整合基于物理的渲染器。

铒激光辅助闭合瓣冠延长术
冠状延长是一种预动理手术程序,可导致更多的牙齿结构和更重建更根尖的牙龈边缘的重建。通常需要增强固定的专业人士或牙齿修复的保留,并防止违反生物遗传宽度。1-3随着美学牙科的发展和“微笑设计”的概念,它通常用于增强患者微笑的外观。1,4-6本文主要着重于突出一种在美学区域加长冠状的替代方法。传统的冠延长程序涉及开放式手术和用旋转仪器清除骨头。1,2,7,8这种过程的愈合期通常为4至6周。1,7,8可能导致术后并发症,例如过度出血,感染,边缘牙龈的再生和炎症。7,9,10
壳板的开发 - 启发论文
4.1 测地线追踪离散化 ................................................................................................................................................ 66 4.2 通过几何程序进行测地线追踪 ................................................................................................................................ 67 4.3 使用优化程序进行测地线追踪 ............................................................................................................................. 72 4.4 地图要求 ...................................................................................................................................................... 77 4.5 地图概念 ............................................................................................................................................................. 78 4.6 地图详述 ............................................................................................................................................................. 80 4.7 唯一性问题 ............................................................................................................................................................. 86 4.8 追踪测地线的精度要求 ............................................................................................................................. 87 4.9 初步验证的图版集 ............................................................................................................................................. 88 4.10 比较验证 .............................................................................................................................................

Purolite™浅壳Shell™SSTPPC60H
本文中包含的陈述,技术信息和建议截至本文之日起准确。由于产品的使用条件和使用条件和方法是我们无法控制的,因此,Purolite明确违反了对任何对产品或对此类信息的使用或依赖造成的结果或产生的任何结果的责任;对于任何特定目的,适合性的保证或任何其他明示或暗示的保证,都没有关于所描述的货物或本文提供的信息的任何其他保证的保证。本文提供的信息仅与指定的特定产品有关,并且当该产品与其他材料或任何过程中使用时可能不适用。此处包含的任何内容构成根据任何专利的执业许可,也不应解释为侵犯任何专利的诱因,建议用户采取适当的步骤以确保对产品的任何建议使用不会导致专利侵权。