XiaoMi-AI文件搜索系统
World File Search System闭环

用于生理信号记录和闭环神经调节
生物电子植入式设备擅长促进对健康的持续监测并能够早期发现疾病,从而深入了解各种身体器官的生理状况。此外,这些先进的系统在神经调节中具有治疗能力,证明了它们通过直接将刺激直接传递到特定靶标来解决不同医疗状况方面的效果。这项全面的评论探讨了生物医学领域内生物电子设备的发展和应用。特别重点是闭环系统的演变,这基于实时生理反馈而脱颖而出。讨论了人工智能(AI)和边缘计算技术的整合,这显着增强了这些设备的诊断和治疗功能。通过解决可植入设备中的元素分析,当前挑战和未来方向,该评论旨在指导生物电子设备进步的途径。
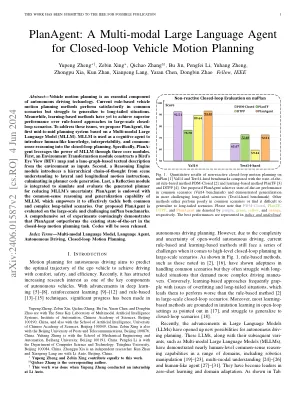
PLANAGENT:闭环车辆运动计划的多模式大语言代理
摘要 - 车辆运动计划是自动驾驶技术的重要组成部分。当前基于规则的车辆运动计划方法在常见的情况下令人满意地表现出色,但努力将其推广到长尾情况。同时,基于学习的方法尚未在大规模闭环场景中实现优于基于规则的方法的优越性能。为了解决这些问题,我们提出了基于多模式大语言模型(MLLM)的第一个中高中计划系统。mllm被用作认知剂,将类似人类的知识,解释性和常识推理引入闭环计划中。具体来说,Plana-Gent通过三个核心模块利用了MLLM的力量。首先,环境变换模块构建了鸟类视图(BEV)地图和从环境中作为输入的基于车道的文本描述。第二,推理引擎模块从场景理解到侧面和纵向运动指令中引入了一个分层的思想,最终导致计划器代码生成。最后,集成了一个反射模块,以模拟和评估生成的计划者,以降低MLLM的不确定性。Planagent具有MLLM的常识推理和概括能力,这使其有效地应对常见和复杂的长尾方案。我们提出的Planagent对大规模和具有挑战性的NUPLAN基准进行了评估。全面的实验集令人信服地表明,Planigent在闭环运动计划任务中的表现优于现有的最新面积。代码将很快发布。

闭环合作伙伴 2023 年影响报告
随着新的“循环”创新的出现。这些因素使得发展循环经济对企业的未来如此重要,以至于它将竞争对手聚集在一起,组建了闭环基金,帮助奠定了美国循环经济的基础基础设施。几年后,随着循环经济的发展,我们最初的闭环基金吸引了更多的企业投资者,包括 3M、亚马逊、BlueTriton、高露洁棕榄、达能和星巴克,催化了更多资本进入循环经济基础设施。随着我们的生态系统不断发展,增加了更多的策略和资产类别,我们吸引了来自金融机构的资本,包括贝莱德管理的基金和账户、领先的家族办公室和基金会捐赠基金。为了满足人们对循环经济日益增长的兴趣,闭环基金的愿景扩展到其他策略,现在所有策略都构成了更广泛的闭环合作伙伴平台。

一种具有无线低能超声波功率和通信功能的新型闭环脑电刺激装置
神经调节装置,例如外周神经刺激器和迷走神经刺激器,被批准用于治疗枕神经痛、偏头痛、癫痫和抑郁症。6 神经调节已被用于治疗肥胖症、7 抑郁症、8 阿尔茨海默病、9 创伤后应激障碍、10 药物成瘾、11 神经性厌食症、12 中风康复 13 和许多其他疾病。随着我们逐渐了解越来越多神经系统疾病的回路过程,我们可以扩大这些创新疗法的适应症。对网络疾病机制的这种日益深入的理解提出了更精细的神经调节方法,可能需要跨多个目标协调神经感知和刺激。在过去十年中,闭环刺激范式已成为神经调节领域的一个重要范式转变。14 该技术现在已在用于治疗癫痫的 RNS 设备中商业化使用。 3 最新一代迷走神经刺激器系统还结合了心率检测作为癫痫发作活动的闭环指标和刺激触发。15 最后,一些最新的 DBS 系统记录选定的局部场电位,并有能力(目前锁定在商业版本中)根据这些信号调整刺激。16

基于脉冲宽度调制的直流电机闭环...
印度海得拉巴 Sridevi 女子工程学院 EEE 系。摘要 使用微控制器和脉冲宽度调制 (PWM) 技术调节直流电机的速度是本项目的主要目标。每个机器人项目都严重依赖直流电机控制。在许多应用中,旋转具有高或低速度限制的直流电机是必要的。我们为此采用 PWM 方法。在脉冲宽度调制 (PWM) 电路中,可以通过调整开关比将平均导通时间从零调整到百分之百,从而产生方波。这允许改变对负载的功率输送。与电阻功率控制器相比,脉冲宽度调制 (PWM) 电路效率更高。当设置为 50% 的负载功率时,PWM 使用大约 50% 的全功率,几乎所有功率都流向负载。相比之下,电阻控制器使用大约 71% 的全功率,其中一半功率流向负载,另外 21% 的功率浪费在加热串联电阻上。脉冲宽度调制还有一个额外的好处,就是允许脉冲达到整个电源电压。这样,它们就能够更容易地克服电机内部的阻力,从而在电机中产生更大的扭矩。这个项目采用了使用嵌入式 C 指令编码的车载计算机。车载计算机可以与输入和输出模块通信。为了显示直流电机的当前速度,LCD 充当输出模块。可以使用控制按钮调整电机的速度。
CAMDIAB确保FDA批准用于先进的自适应混合闭环应用程序CAMAPS FX
Camdiab Ltd是一家数字健康和个性化医学公司,专注于其世界领先的,可互操作的Camaps FX FX封闭循环应用程序的设计,开发和商业化。Camaps FX设计用于使用自适应的自学习控制算法,该算法与兼容连续的葡萄糖监测装置和兼容的胰岛素泵相关,以自主计算和直接胰岛素输送以保持所需的血糖水平。自2019年成立以来,其任务一直是帮助1型糖尿病及其家人过着更好的生活。有关更多信息,请访问www.camdiab.com或在Facebook,LinkedIn和X(以前为Twitter)@Camaps_FX上关注Camdiab Ltd及其产品。

闭环电子束诱导的光谱和纳米尺寸发射器
摘要:钻石中的颜色中心在量子光子技术的发展中起着核心作用,而其重要性只有在不久的将来才会增长。对于许多量子应用,需要单个发射器的高收集效率,但是钻石与空气之间的折射率不匹配使常规钻石设备几何形状的最佳收集效率。虽然存在具有近乎统一效率的不同外耦合方法,但由于纳米制作方法的当前局限性,尤其是对于钻石等机械硬材料,尚未实现许多。在这里,我们利用电子束诱导的蚀刻来修改含有宽度和厚度为280 nm和200 nm的集成波导的SN植入钻石量子微芯片。这种方法允许同时使用开放的几何形状和直接写作对主机矩阵进行高分辨率成像和修改。与电子 - 发射极相互作用产生的阴极发光信号相结合时,我们可以通过纳米级空间分辨率实时监测量子发射器的增强。Operando

混合闭环系统Minimed™780G
G4传感器通常不需要。However, blood glucose (BG) readings may be requested/required in the following cases: - To start SmartGuard TM Mode - If medication containing Paracetamol has been taken - ‘Calibrate now' or ‘Enter BG Now' alert appears - SmartGuard TM Shield is visible, but SmartGuard TM bolus recommends using a blood glucose Note: All glucose readings entered into the pump are used as calibrations, therefore it is important to要求在要求时输入血糖读数,但要避免过于频繁地进入其他读数。基础递送自动化基础是基于每日总剂量(TDD),每5分钟根据传感器的葡萄糖和预测进行一次调整一次 - 完全悬浮 - 散布仍然可以交付 - 如果不可以到达“最大基础”,则智能TM模式将exit和smartguard tm模式恢复到手动模式手动模式

一种多主体闭环方法,用于自主发现氮还原的电催化剂
快速发现新型高性能电催化剂对于促进化学和材料行业的电化学革命至关重要。1,2然而,从大量可能的设计空间中识别最有希望的催化剂系统代表了一个重要的挑战。3,这种挑战会随着电催化剂设计的细微差别而加剧,扩展到新型材料类别,在这种新型材料类别中,确定最佳的活动趋势可能是高度不平凡的。不仅新近培养的催化剂需要具有最佳的催化活性,而且还需要满足其他几个绩效限制,以便在工业规模上相关。例如,(1)任何有前途的候选系统都必须在经济上可行(例如能够以相对较低的成本以相对较低的成本进行大规模合成),(2)候选系统必须在动态和操作上稳定,等等。因此,理想高性能催化剂的发现和设计需要平衡几个标准,不限于催化性能,