
机构名称:
¥ 1.0
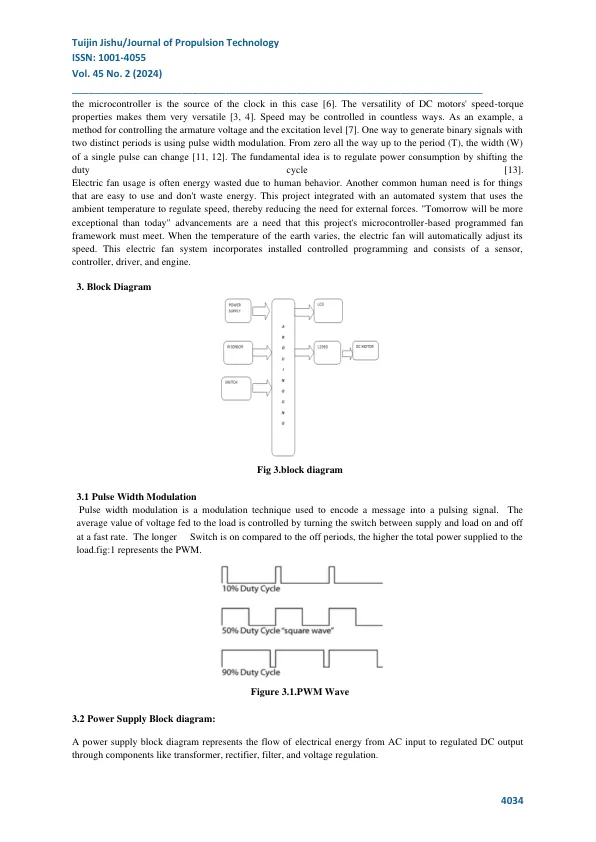
印度海得拉巴 Sridevi 女子工程学院 EEE 系。摘要 使用微控制器和脉冲宽度调制 (PWM) 技术调节直流电机的速度是本项目的主要目标。每个机器人项目都严重依赖直流电机控制。在许多应用中,旋转具有高或低速度限制的直流电机是必要的。我们为此采用 PWM 方法。在脉冲宽度调制 (PWM) 电路中,可以通过调整开关比将平均导通时间从零调整到百分之百,从而产生方波。这允许改变对负载的功率输送。与电阻功率控制器相比,脉冲宽度调制 (PWM) 电路效率更高。当设置为 50% 的负载功率时,PWM 使用大约 50% 的全功率,几乎所有功率都流向负载。相比之下,电阻控制器使用大约 71% 的全功率,其中一半功率流向负载,另外 21% 的功率浪费在加热串联电阻上。脉冲宽度调制还有一个额外的好处,就是允许脉冲达到整个电源电压。这样,它们就能够更容易地克服电机内部的阻力,从而在电机中产生更大的扭矩。这个项目采用了使用嵌入式 C 指令编码的车载计算机。车载计算机可以与输入和输出模块通信。为了显示直流电机的当前速度,LCD 充当输出模块。可以使用控制按钮调整电机的速度。
基于脉冲宽度调制的直流电机闭环...
主要关键词


相关文件推荐




























