XiaoMi-AI文件搜索系统
World File Search System阻塞

EYLEA 处方信息
完整处方信息:目录* 1 适应症和用法 1.1 新生血管性(湿性)年龄相关性黄斑变性 (AMD) 1.2 视网膜静脉阻塞 (RVO) 后黄斑水肿 1.3 糖尿病性黄斑水肿 (DME) 1.4 糖尿病性视网膜病变 (DR) 1.5 早产儿视网膜病变 (ROP) 2 剂量和给药 2.1 重要注射说明 2.2 给药准备 - 预充注射器 2.3 给药准备 - 小瓶 2.4 成人注射程序 2.5 新生血管性(湿性)年龄相关性黄斑变性 (AMD) 2.6 视网膜静脉阻塞 (RVO) 后黄斑水肿 2.7 糖尿病性黄斑水肿 (DME) 2.8 糖尿病性视网膜病变 (DR) 2.9早产儿视网膜病变 (ROP) 3 剂型和规格 4 禁忌症 4.1 眼部或眼周感染 4.2 活动性眼内炎症 4.3 超敏反应 5 警告和注意事项 5.1 眼内炎、视网膜脱离和视网膜血管炎(有或无阻塞) 5.2 眼压升高 5.3 ROP 的延长监测和额外治疗 5.4 血栓栓塞事件


心血管生理学MCQ测试银行的答案
37)在称为“完整心脏障碍”的条件下,会发生什么?a)冠状动脉被斑块阻塞,防止血液和氧气到达心肌收缩细胞。b)来自SA节点的电信号永远不会到达心室,因此心房的收缩不与心室收缩协调。c)心脏的纤维骨架分解,干扰了从心房到心室的血液传递。d)二尖瓣小叶钙化和关闭,防止血液被心脏左侧有效泵送。e)通过卵形孔的血流阻塞。答案:B部分:心脏作为泵学习结果:14.8 Bloom的分类学:理解

阻抗检测和电介导细胞凋亡
心血管疾病仍然是全球的一大负担,三分之一的死亡可归因于该疾病的后果。主要原因是动脉阻塞,而动脉阻塞通常无法检测。植入式医疗设备 (IMD)(如支架和移植物)通常用于重新打开血管,但随着时间的推移,这些设备也会再次阻塞。开发了一种血管生物传感器,可以报告细胞情况,并可安装在支架或移植物上进行远程报告。此外,该设备还设计用于接收可诱导受控细胞死亡(凋亡)的电流。组合诊断和治疗生物传感器将为治疗动脉粥样硬化和中心静脉通路等血管疾病带来变革。在这项工作中,开发了一种基于相同交叉电极 (IDE) 的细胞感应和细胞凋亡系统。结果表明,该设备可扩展,并且通过小型化 IDE,检测灵敏度得到提高。使用频率为 10 kHz 的连续阻抗测量来监测血管平滑肌细胞的凋亡,并使用荧光染料和活细胞成像来追踪细胞死亡率。
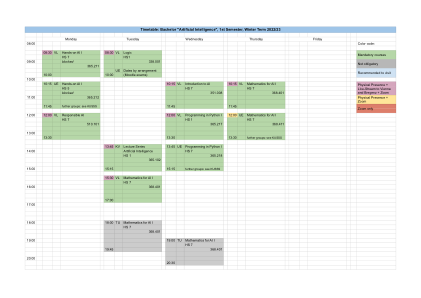
时间表:学士学位“人工智能”,第一学期,2022/23 冬季学期
08:30 交替阻塞: 08:30 交替阻塞: 08:30 同时:必修课程 KV 人工智能 UE LSTM 和循环 VL 最优和自适应 09:00 社会神经网络 I 365.264 信号处理系统。非必修 HS 6 UE 深度学习和 HS 5 / Track 2 382.017 510.104 神经网络 I 365.261 VL 模型检查 建议访问 VL 控制系统 10:00 10:00 HS 6 / Track 3 338.044 10:00 HS 6 / Track 1 课程 361.060 10:15 交替阻塞: 10:15 VL 规划和推理 10:15 VL 生产自动化 10:15 VL 深度学习和 UE 控制系统 UE LSTM 和 AI 系统中的递归 神经网络 I 入学课程 HS 6 / Track 1 神经网络 365.203 HS 6 / Track 3 HS 6 / Track 1 HS 7 11:00 361.006 UE 深度学习和338.040 510.204 365.105 神经网络 I 365.201 现场出席 + 维也纳和布雷根茨现场直播 + Zoom 11:45 11:45 11:45 UE:项目 11:45 11:45

定量测量和肾分析 -
摘要:我们试图通过应用图像处理来定义肾脏内部肾脏密度的量化测量,通过应用图像处理来定义肾脏阻塞水平,可转换FFT,小波和Harr提取,并在通过伽马机通过变换和放射性计数测量的密度之间找到相关性。在这项回顾性研究中,我们考虑了140次肾闪烁显像扫描,从中度到重度诊断出110例肾脏阻塞(肾传感),发现30例正常功能肾脏。从110例病例中诊断为左肾脏肾脏病(LK-HL),M/F比为43/21,46例被诊断为M/F比为23/23的右肾脏肾脏病(RK-HR)。所选病例的平均年龄为25.65±24.58岁。三个图像增强的变换,即FFT,小波和Harr提取用于肾脏扫描,以检测肾脏内部的黑暗密度。通过Spearman的相关方法,密度测量计数和闪烁光测量的放射性计数之间的相关性。在肾脏肾脏肾脏肾脏肾脏和右侧的肾结化肾脏既有肾脏的放射性计数99m tc- dTPA之间,FFT测得的密度与动态肾脏闪烁显像USIN 99M TC-DTPA(分别分别分别为0.81和e = 0.81 and = 0.80)。还发现小波和Harr Transform的措施和闪烁显像措施之间的中等正相关。总而言之,这项研究表明,FFT方法可用于计数密度在阻塞数方面进行计数,并且可以考虑使用该密度的这些定量测量方法来定义阻塞/肾结化计数,而不是将中等水平报告为严重水平。

thinkgrasp:一种愿景语言系统,用于杂乱无章的战略部分抓住
摘要:由于阻塞和复杂的物体排列,机器人抓握在混乱的环境中仍然是一个重要的挑战。我们开发了ThinkGrasp,这是一种插件的视觉语言握把系统,它利用GPT-4O的高级上下文推理来实现沉重的混乱环境抓地策略。thinkGrasp可以通过使用面向目标的语言来指导去除阻塞物体的障碍物,可以有效地识别和产生目标对象的掌握姿势。这种方法可以从中揭示目标对象,并最终以几个步骤和高成功率掌握了目标对象。在模拟和真实的实验中,ThinkGrasp在沉重的混乱环境中或具有多种看不见的物体中取得了很高的成功率,并且表现出强大的概括能力。