XiaoMi-AI文件搜索系统
World File Search System静态数据
用户手册 - Geizhals静态内容
该产品包含两个AAA碱性电池。•请勿加热电池。•不要变形电池。•请勿充电电池。•请勿将电池置于火中。•使电池远离阳光直射和热源,请勿在高温和湿度环境中存储。•请勿摄取电池,化学燃烧危险。•将新电池和二手电池远离儿童。•如果电池舱未安全地关闭,请停止使用该产品并将其远离儿童。•如果您认为电池可能已经被吞咽或放置在身体的任何部位内,请立即进行医疗护理。
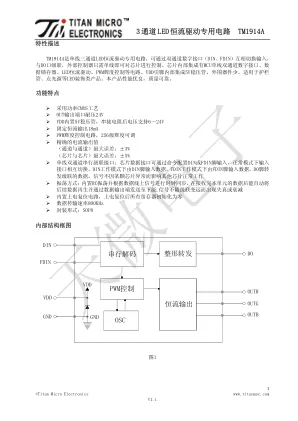
3通道LED恒流驱动专用电路TM1914A
功能说明 1、模式设置 本芯片为单线双通道通讯,采用归一码的方式发送信号。芯片接收显示数据前需要配置正确的工作 模式,选择接收显示数据的方式。模式设置命令共48bit,其中前24bit为命令码,后24bit为检验反码, 芯片复位开始接收数据,模式设置命令共有如下3种: (1)0xFFFFFF_000000命令: 芯片配置为正常工作模式。在此模式下,首次默认DIN接收显示数据,芯片检测到该端口有信号输 入则一直保持该端口接收,如果超过300ms未接收到数据,则切换到FDIN接收显示数据,芯片检测到该 端口有信号输入则一直保持该端口接收,如果超过300ms未接收到数据,则再次切换到DIN接收显示数据。 DIN和FDIN依此循环切换,接收显示数据。 (2)0xFFFFFA_000005命令: 芯片配置为DIN工作模式。在此模式下,芯片只接收DIN端输入的显示数据,FDIN端数据无效。 (3)0xFFFFF5_00000A命令: 芯片配置为FDIN工作模式。在此模式下,芯片只接收FDIN端输入的显示数据,DIN端数据无效。 2、显示数据

同时发生静态干扰的实时识别与规避...
使用有效的飞行策略在未知场景中避开混合障碍物是无人机应用面临的关键挑战。在本文中,我们介绍了一种更强大的技术,仅使用点云输入即可区分和跟踪动态障碍物和静态障碍物。然后,为了实现动态避障,我们提出了禁忌金字塔方法,以迭代方式采用有效的基于采样的方法求解期望的飞行器速度。通过求解具有期望速度和航路点约束的非线性优化问题来生成运动基元。此外,我们提出了几种技术来处理近距离物体的位置估计误差、可变形物体的误差以及不同子模块之间的时间间隔。所提出的方法已实现在机上实时运行,并在模拟和硬件测试中得到了广泛的验证,证明了我们在跟踪鲁棒性、能量成本和计算时间方面的优势。
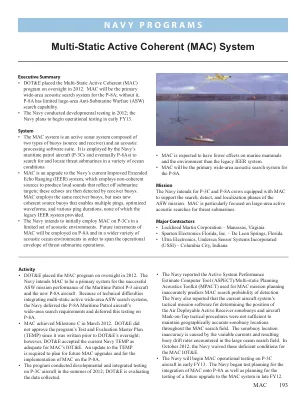
多静态主动相干 (MAC) 系统
• 海军报告称,用于 MAC 任务规划的主动系统性能评估计算机工具 (ASPECT)/多静态规划声学工具包 (MPACT) 无法准确预测 MAC 搜索的探测概率。海军还报告称,当前飞机系统的战术任务软件用于确定空中部署主动接收器声纳浮标的位置,而飞机顶部标记战术程序不足以在整个 MAC 搜索领域保持声纳浮标的地理准确位置。声纳浮标位置不准确是由大型海洋搜索领域遇到的可变电流和由此产生的浮标漂移率造成的。2012 年 10 月,海军放弃了 MAC IOT&E 的这些缺陷条件。• 海军将于 2013 财年年初开始在 P-3C 飞机上进行 MAC 操作测试。海军于 2012 财年末开始测试计划将 MAC 集成到 P-8A 上,并计划测试 MAC 系统的未来升级。

多静态声纳浮标系统的多目标跟踪
使用主动声纳浮标场检测和跟踪水下目标最近引起了广泛的研究兴趣 [1],[2],[3],[4],[5],[6]。这个问题涉及确定声纳浮标场覆盖区域内的目标数量并跟踪它们的位置。通过从单一源(声纳浮标)传输信号(“ping”)并收集附近多个接收器的反射测量值来获得目标的测量值。由于水下环境中的检测概率低,以及可用的位置测量值(通常采用极坐标)与目标状态之间的非线性关系,因此出现了困难。在 [5] 中,提出了一种 CPHDF 的迭代校正版本的高斯混合近似用于目标检测和跟踪,并基于该算法描述了一种发射机调度算法。还提出了一种使用折扣因子来考虑电池寿命约束的基本技术。本文主要关注多静态声纳浮标环境中的多目标跟踪问题。基数化概率假设密度滤波器 (CPHDF) [7] 已在多静态声纳浮标系统中用于跟踪 [1]、[3]、[5]。CPHDF 是在随机有限集 (RFS) 框架中开发的,它通过其一阶矩和基数或目标数分布来近似完整的多目标后验密度
静态和热负载下的帕利行为
f d A value of the picnotropy factor at the asymptotic state boundary surface F m Matsuoa-Nakai factor f s barotropy factor f u collapse potential factor g plastic potential G soil shear modulus G gradient of the soil shear modulus with depth G eff soil effective shear modulus G in soil initial shear modulus G L soil shear modulus at pile tip G L /2 soil shear modulus at pile mid length G m plastic potential for the Mohr-Coulomb model G mech soil mobilized shear modulus G 0 small strain soil shear modulus G 1 soil shear modulus of the shallower layer for two-layer soil G 2 soil shear modulus of the deeper layer for two-layer soil G 90 initial shear stiffness after a 90 ◦ change in the strain path direction h function for the hardening law h Heaviside function h 1 thickness of the shallower layer for two-layer soil H 2厚度的较深层的两层土壤H P硬化模量ˆ

静态挠度和固有频率的实验研究...
摘要在这项研究中,通过实验研究了固定长度为60 cm的固定杆的静态挠度和固有频率,并具有不同长度的零件。Six rods were used, each divided into the following parts: (60 cm copper), (12cm aluminium– 48cm copper), (24cm aluminium–36cm copper), (36cm aluminium–24cm copper), (48cm aluminium–12cm copper), (60cm aluminium).杆在每一端的简单支撑中固定。静态挠度是通过移动数字拨号量表与杆划分一起测量的,同时每次固定载荷值。通过振荡器装置测量每个杆的固有频率。结果表明,铝制成分的静态偏转大于铜制成的部分,而杆的固有频率随着铝比例的增加而增加,而铝的固有频率与每个杆的铜相比。关键词:静态挠度,铜,铝,固有频率

水下多静态声纳发展综述...
随着降噪技术的发展,潜艇的噪声越来越小,来自壁面或螺旋桨的声发射也越来越小,声发射减小,探测距离缩短,被动声纳越来越难以探测到潜艇,尤其在海上稳定时,被动声纳更是完全无用武之地。多基地声纳是一种可以弥补这一不足的有力技术。多基地声纳由声发射部件和分布在空间不同位置的声接收器等部分组成。声发射部件是向空间发射声能的声源,声接收器是用于收集来自不同位置的声反射的被动声纳。由于接收器静默地静止在任何可能的位置,敌方不可能找到接收器的确切位置,从而给敌方的对抗和规避带来困难。它具有掩蔽性好、抗干扰能力强、容易实现和优化、机动灵活、作用距离远、定位精度高等优点,非常适合于吊放声呐的探测应用和舰机联合潜艇探测应用。

伞兵部署的静态计算机模拟...
介绍了一种能够预测伞兵部署的计算机模拟。部署过程分为三个阶段,使用不同的理论方法进行分析。使用有限元方法模拟降落伞在空气动力载荷下的弯曲,这种弯曲发生在从部署袋中提取过程中。伞盖充气采用半经验 Pflanz-Ludtke 方法建模。获得的结果与实际伞兵跳跃的照片和视频数据非常吻合。为了在 A400M 周围的非均匀流场内模拟部署,提出了一种利用风洞测试和 CFD 计算数据的方法。相应的模拟用于分析“交叉”的风险——这是一种潜在的致命情况,伞兵被拉向飞机后方的中心线。