XiaoMi-AI文件搜索系统
World File Search System飞行控制
撤资转投资:航空航天和国防领域的投资组合塑造
RTX 正在以 18 亿美元的价格将其柯林斯航空业务部门的作动和飞行控制项目出售给法国赛峰集团,这是将非同盟资产转化为资本以再投资于战略领域的一个典型例子。这笔交易完善了 RTX 的业务重点,使其能够投资于与其战略目标更紧密相关的高增长领域,并帮助赛峰集团成为一家拥有端到端作动和飞行控制产品组合的全面整合企业。1 同样,Triumph Group Inc. 的产品支持业务(为结构部件、发动机和机身配件、内部翻新以及机轮和刹车提供维护、维修和运营服务)以 7.25 亿美元的价格出售给 AAR 2,这证明了专注于核心业务和扩展能力的好处。

737-6Q8/-7Q8/-8Q8 飞行机组操作手册
飞机通用、应急设备、门、窗......................................................................................1 空气系统......................................................................................................2 防冰、防雨......................................................................................................3 自动飞行......................................................................................................4 通信......................................................................................................5 电气......................................................................................................6 发动机、APU.............................................................................................7 防火.............................................................................................................8 飞行控制......................................................................................................9 飞行仪表、显示器......................................................................................10 飞行管理、导航.............................................................................................11 燃料.............................................................................................................12 液压系统.............................................................................................................13 起落架.............................................................................................................14 警告系统.............................................................................................................15
BVR Gen 3 DCU - İmaj Teknik Elektrik
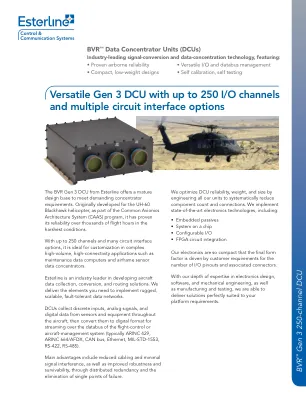
DCU 从整个飞机的传感器和设备收集离散输入、模拟信号和数字数据,然后将它们转换为数字格式,以便通过飞行控制或飞机管理系统的数据总线进行传输(通常是 ARINC 429、ARINC 664/AFDX、CAN 总线、以太网、MIL-STD-1553、RS-422、RS-485)。

BVR 远程 DCU - Imaj Teknik Elektrik
DCU 从整个飞机的传感器和设备收集离散输入、模拟信号和数字数据,然后将其转换为数字格式,以便通过飞行控制或飞机管理系统的数据总线进行流式传输(通常是 ARINC 429、ARINC 664/AFDX、CAN 总线、以太网、MIL-STD-1553、RS-422、RS-485)。
BVR Gen 3 DCU - Imaj Teknik Elektrik
DCU 从整个飞机的传感器和设备收集离散输入、模拟信号和数字数据,然后将其转换为数字格式,以便通过飞行控制或飞机管理系统的数据总线进行流式传输(通常是 ARINC 429、ARINC 664/AFDX、CAN 总线、以太网、MIL-STD-1553、RS-422、RS-485)。
关于 Saab 2000 严重事故的报告,G-LGNO...
°C 摄氏度 AAIB 航空事故调查部门 机场以上高度 Aal AC 咨询通告 ACAS 机载防撞系统 AD 适航指令 ADC 大气数据计算机 ADF 自动测向设备 AFCAS 自动飞行控制与增强系统 AMC 可接受的合规方法 平均海平面以上高度 AOM 航空器操作手册 APU 辅助动力装置 ATC 空中交通管制 ATIS 自动终端信息系统 CAA 民航局 CAA-NL 荷兰民航局 CBIT 连续内置测试 cm 厘米 CS 认证规范 CVR 驾驶舱语音记录器 CWS 控制轮转向模式 DC 直流电 DFDR 数字飞行数据记录器 EASA 欧洲航空安全局 EFIS 电动飞行仪表系统 EGPWS 增强型 GPWS EICAS 发动机指示和机组警报系统 EPTS 紧急俯仰配平系统 FAA 美国联邦航空管理局 FCC 飞行控制计算机 FDR 飞行数据记录器 FGS 飞行引导系统 FL 飞行高度层

飞行控制设计 – 最佳实践 - NATO STO
该任务组(前身为 AGARD 工作组 23)于 1996 年正式成立,其起源和基本原理包含在 1994 年 9 月撰写的一份试验性论文中。该文件引用了先进飞行控制系统 (FCS) 在 20 世纪 80 年代和 90 年代初的应用。尽管取得了许多重大成功,如成功飞行的基于数字飞行控制系统的实验和生产飞机的数量所证明的那样,但对北约至关重要的主要项目却因 FCS 开发问题而遭遇困境。在美国和欧洲,由于最新技术飞机中不利的振荡飞机-飞行员耦合现象而发生了广为人知且引人注目的事故。其他项目存在不太为人所知的 FCS 开发问题,时间和成本超支是常态,而不是例外。这些事件表明,尽管取得了成功,但从飞行品质的角度来看,被证明是安全的、可靠且经济实惠的数字飞行控制系统开发过程解决方案并非普遍可用。

使用基于 AI 的避障技术实现无人机安全着陆
摘要 — 随着第四次工业革命的进行,许多关于无人机的研究工作已经积极开展。目前,无人机技术最重要的部分之一是飞行过程中障碍物的自主识别和避障。通常情况下,无人机依靠 GPS 信号按照飞行前指定的航路点飞行。然而,当无人机接近指定着陆点时,可能会出现障碍物和不可预见的物体,这些障碍物和物体可能会严重危及无人机的安全着陆。因此,无人机的安全着陆成为一个非常重要的问题。在这方面,本研究探讨了将人工智能 (AI) 技术应用于无人机的可能性,以提高安全性。通过将图像传感器、支持 AI 的物体识别和无人机飞行控制计算机集成在一起,无人机可以更安全地着陆,而不必担心在飞行着陆阶段因意外障碍物而翻倒或严重损坏。 索引术语 — 着陆平台跟踪、避障、图像分割、人工智能、二维坐标、飞行控制

XV-15 倾转旋翼机综合实时飞行模拟器的实现
本文介绍了一种倾转旋翼飞行模拟平台,用于实时模拟 Bell XV-15 飞机,供教学和研究之用。倾转旋翼飞机的数学模型在 MATLAB/Simulink © 中实现,包括飞机动力学、执行器、传感器和飞行控制计算机的简化模型。实现的倾转旋翼数学模型与飞行控制硬件(即飞行操纵杆和方向舵踏板)相连,飞行员使用这些硬件来设置输入命令。相反,图形环境由 FlightGear 提供,FlightGear 是一种广泛用于研究活动的开源跨平台软件。本文的另一个贡献是设计和实施了稳定性控制和增强系统,以增强飞机稳定性并改善操纵品质。开发的模拟器通过多次模拟进行测试,验证了开发的数学模型和稳定性控制和增强系统的有效性。结果是一个可在商用笔记本电脑上执行的倾转旋翼飞行模拟平台,具有实时性能,可用于研究和教学活动。
飞行控制设计 – 最佳实践 - NATO STO
该任务组(前身为 AGARD 工作组 23)于 1996 年正式成立,其起源和基本原理包含在 1994 年 9 月撰写的一份试验性论文中。该文件引用了先进飞行控制系统 (FCS) 在 20 世纪 80 年代和 90 年代初的应用。尽管取得了许多重大成功,如成功飞行的基于数字飞行控制系统的实验和生产飞机的数量所证明的那样,但对北约至关重要的主要项目却因 FCS 开发问题而遭遇困境。在美国和欧洲,由于最新技术飞机中不利的振荡飞机-飞行员耦合现象而发生了广为人知且引人注目的事故。其他项目存在不太为人所知的 FCS 开发问题,时间和成本超支是常态,而不是例外。这些事件表明,尽管取得了成功,但从飞行品质的角度来看,被证明是安全的、可靠且经济实惠的数字飞行控制系统开发过程解决方案并非普遍可用。