XiaoMi-AI文件搜索系统
World File Search System飞行控制

飞行控制设计 – 最佳实践 - NATO STO
该任务组(前身为 AGARD 工作组 23)于 1996 年正式成立,其起源和基本原理包含在 1994 年 9 月撰写的一份试验性论文中。该文件引用了先进飞行控制系统 (FCS) 在 20 世纪 80 年代和 90 年代初的应用。尽管取得了许多重大成功,如成功飞行的基于数字飞行控制系统的实验和生产飞机的数量所证明的那样,但对北约至关重要的主要项目却因 FCS 开发问题而遭遇困境。在美国和欧洲,由于最新技术飞机中不利的振荡飞机-飞行员耦合现象而发生了广为人知且引人注目的事故。其他项目存在不太为人所知的 FCS 开发问题,时间和成本超支是常态,而不是例外。这些事件表明,尽管取得了成功,但从飞行品质的角度来看,被证明是安全的、可靠且经济实惠的数字飞行控制系统开发过程解决方案并非普遍可用。
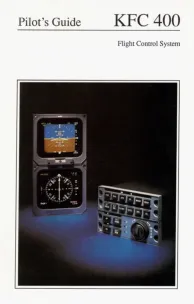
KFC 400 - Bendix/King
KFC 400 飞行控制系统在一台计算机中整合了完整的自动驾驶仪和飞行指引仪计算功能。其数字飞行计算机和集成架构使 KFC 400 能够更快地确定飞机控制要求,并且比以前的自动驾驶仪系统更平稳、更准确地执行这些要求。主要由于其双通道飞行计算机设计,KFC 400 可以更积极地控制飞机,同时提供单通道系统无法提供的安全监控级别。整个飞行控制系统采用数字化、固态设计,在节省系统重量和所需安装空间的同时,提供最大的可靠性。KFC 400 旨在优化乘客和机组人员的舒适度,同时在任何飞行情况下仍提供准确的控制响应。只要有可能,自动驾驶仪引起的飞机运动就会接近人类可感知的下限,从而确保飞行异常平稳。但是,飞行控制系统的许多最大可控值是在飞行控制系统认证过程中为每架飞机确定的。有关特定值,请参阅您的飞机的 KFC 400 飞行手册补充。
飞行控制设计 – 最佳实践 - NATO STO
该任务组(前身为 AGARD 工作组 23)于 1996 年正式成立,其起源和基本原理包含在 1994 年 9 月撰写的一份试验性论文中。该文件引用了 20 世纪 80 年代和 90 年代初先进飞行控制系统 (FCS) 的应用。尽管取得了许多重大成功,正如成功飞行的基于数字飞行控制系统的实验和生产飞机数量所证明的那样,但对北约至关重要的主要项目却因 FCS 开发陷入困境而受到影响。由于最新技术飞机中不利的振荡飞机-飞行员耦合现象而导致的事故广为人知且引人注目,无论是在美国还是在欧洲。其他项目存在不太为人所知的 FCS 开发问题,时间和成本超支是常态,而不是例外。这些事件表明,尽管取得了成功,但从飞行品质的角度来看,在数字飞行控制系统的开发过程中,尚未普遍提供可靠且经济实惠的解决方案,以证明其安全。
飞行控制设计 - 最佳实践 - NATO STO
该任务组(前身为 AGARD 工作组 23)于 1996 年正式成立,其起源和基本原理包含在 1994 年 9 月撰写的一份试验性论文中。该文件引用了先进飞行控制系统 (FCS) 在 20 世纪 80 年代和 90 年代初的应用。尽管取得了许多重大成功,正如成功飞行的基于数字飞行控制系统的实验和生产飞机数量所证明的那样,但对北约至关重要的主要项目却因 FCS 开发陷入困境而受到影响。由于最新技术飞机中不利的振荡飞机-飞行员耦合现象而导致的事故广为人知且引人注目,无论是在美国还是在欧洲。其他项目存在不太为人所知的 FCS 开发问题,时间和成本超支是常态,而不是例外。这些事件表明,尽管取得了成功,但从飞行品质的角度来看,在数字飞行控制系统的开发过程中,尚未普遍提供可靠且经济实惠的解决方案,以证明其安全。

论文 昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
昆虫飞行控制研究主要集中在翅膀的作用上。然而,飞行过程中腹部的偏转可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并询问腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可以最大限度地减少跟踪误差和传输成本。此外,我们通过在胸腹关节上固定碳纤维棒来测试限制腹部运动对活天蛾自由飞行的影响。腹部受限的飞蛾表现比假治疗飞蛾差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。
昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
昆虫飞行控制研究主要集中在翅膀的作用上。然而,飞行过程中腹部的偏转可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并探究腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可以最大限度地减少跟踪误差和传输成本。此外,我们还通过在胸腹关节上固定一根碳纤维棒来测试限制腹部运动对活天蛾自由飞行的影响。腹部受限的蛾子表现比假治疗蛾子差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构的运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。
CANaerospace/AGATE 数据总线 - 股票飞行系统
• 基于飞行控制和制导系统方面的经验,Stock Flight Systems 于 1997 年创建了 CANaerospace 接口定义。CANaerospace 是一个开放标准,任何人都可以免费使用。2001 年,美国国家航空航天局 (NASA) 还将 CANaerospace 标准化为“AGATE 数据总线”(文件 AGATE-WP01-001-DBSTD,兰利研究中心)。

5AN3 飞机系统单元 1 说明.pdf
简介 飞行控制系统的架构对所有飞行操作都至关重要,多年来,其架构发生了重大变化。首次飞行后不久,铰接式表面就被引入用于基本控制,由飞行员通过电缆和滑轮系统进行操作。这项技术存活了几十年,现在仍用于小型飞机。大型飞机的引入和飞行包线的增加使得飞行员的肌肉力量在许多情况下不足以抵消由于表面偏转而产生的气动铰链力矩;该问题的第一个解决方案是引入气动平衡器和调整片,但飞机尺寸和飞行包线的进一步增长带来了对动力系统的需求,以控制铰接式气动表面。如今,可以找到两大类飞行控制系统:滑翔机和小型通用航空的全机械控制,以及大型或战斗机的动力或伺服辅助控制。伺服机构引入后,最大的附加效应之一就是可以使用主动控制技术,直接作用于飞行控制执行器,从而带来一系列好处: • 补偿基本机身的空气动力学缺陷; • 稳定和控制通常性能更高的不稳定飞机; • 大迎角飞行; • 自动失速和旋转保护; • 阵风缓解。