XiaoMi-AI文件搜索系统
World File Search System飞行的
如何在没有真正飞行的情况下取得成功:日本航空业和日本的技术意识形态
自第二次世界大战结束以来,美国在军事研发上的投入比日本多出数十亿美元。 19即使在今天,尽管美国经济衰退,日本军费开支持续增加,但日本每年的国防研发支出(不到 1000 亿日元)与美国超过 5 万亿日元的支出相比还是相形见绌。在日本,官方国防研发仅占政府研发总额的 5%,而在美国,政府支出占 60% 以上。 2但是,尽管战后美国为发展国防技术付出了巨大的努力,名义支出存在巨大差异,而且日本不设计或制造用于出口的军事装备,但日本商业制造商现在在许多领域展现出的军民两用生产能力已匹敌甚至超过美国的能力。 3
如何在没有真正飞行的情况下取得成功:日本航空业和日本的技术意识形态
自第二次世界大战结束以来,美国在军事研发上花费的资金比日本多出数十亿美元。’即使在今天,尽管美国经济衰退,日本军费开支持续增加,但日本每年的国防研发支出(不到 1000 亿日元)与美国超过 5 万亿日元的支出相比相形见绌。在日本,官方国防研发仅占政府研发总额的 5%,而在美国,政府支出占 60% 以上。2 但是,尽管战后美国为发展国防技术付出了巨大的努力,名义支出存在巨大差异,而且日本不设计或制造用于出口的军事装备,但日本商业制造商现在在许多领域展现出的军民两用生产能力已匹敌或超过美国的能力3
AH-64D 长弓阿帕奇直升机仪表气象条件/仪表飞行规则飞行的操纵品质评估
仪表起飞________________________________________________________________20 无线电导航 FMC 开启 ___________________________________________________________21 无线电导航,FMC 关闭_____________________________________________________22 NDB 进近___________________________________________________________________23 全球定位系统 (GPS) 进近 ____________________________________________25 仅使用备用仪表进行异常姿态恢复 _______________________________26 仅使用备用仪表进行机场监视雷达 (ASR) 进近 _________________27 仅使用备用仪表进行精密进近雷达 (PAR) ________________________________________28

文章 飞行员的尽责性与皮肤电稳定性相关:社会压力下模拟飞行的研究
摘要:对于飞行员来说,应对焦虑的能力在飞行过程中至关重要,因为他们可能会面临压力。根据大五人格量表,这种能力可以通过两种重要的人格特质进行调节:尽责性和神经质。前者与注意力有关,后者与对焦虑刺激的注意力偏差有关。鉴于目前用于检测用户状态的监测系统的发展,该系统可以并入驾驶舱,因此需要估计它们对个体间人格差异的鲁棒性。事实上,几种情绪识别方法都是基于生理反应,这些反应可以通过特定的人格特征进行调节。对 20 名飞行员的人格特质进行了评估。之后,他们进行了两次连续的模拟飞行,一次没有社会压力,一次有社会压力,同时测量皮肤电活动。在第二次飞行之前,也就是压力诱发条件之前,对他们的主观焦虑进行了评估。结果表明,神经质得分较高与认知和躯体焦虑呈正相关。此外,在社会压力下,尽责性得分越高与皮肤电稳定性(即皮肤电导反应次数越少)呈正相关。这些关于自我报告和生理反应的结果都支持将人格差异纳入飞行员的状态监测中。
附件 6
2.4.4 在水面上空飞行的飞机 ...................................................................................................................... 2.4-3 2.4.5 在指定陆地区域上空飞行的飞机 ........................................................................................................ 2.4-4 2.4.6 高空飞行的飞机 ...................................................................................................................... 2.4-5 2.4.7 所有按照仪表飞行规则运行的飞机 ............................................................................................. 2.4-5 2.4.8 在夜间飞行的飞机 ...................................................................................................................... 2.4-6 2.4.9 符合附件 16 第 I 卷噪声认证标准的飞机 ............................................................................. 2.4-6 2.4.10 马赫数指示器 ............................................................................................................................. 2.4-6 2.4.11 需要配备近地警告系统(GPWS)的飞机 ............................................................................. 2.4-6 2.4.12 紧急定位发射机(ELT) ................................................................................................ 2.4-8 2.4.13 需要配备压力高度报告应答器的飞机 .............................................................. 2.4-8 2.4.14 麦克风 ................................................................................................................................
FL-2 操作和安装说明
坦克 坦克 坦克 坦克 坦克。"使用 FL-2 不会消除或减少飞行员使用良好飞行的必要性。"使用 FL-2 不会消除或减少飞行员使用良好飞行的必要性。"使用 FL-2 不会消除或减少飞行员使用良好飞行的必要性。"使用 FL-2 不会消除或减少飞行员使用良好飞行的必要性。"使用 FL-2 不会消除或减少飞行员使用良好飞行的必要性。"使用 FL-2 不会消除或减少飞行员使用良好飞行计划、飞行前和飞行中技术来管理燃料的必要性。计划、飞行前和飞行中技术来管理燃料。计划、飞行前和飞行中技术来管理燃料。计划、飞行前和飞行中技术来管理燃料。计划、飞行前和飞行中技术来管理燃料。
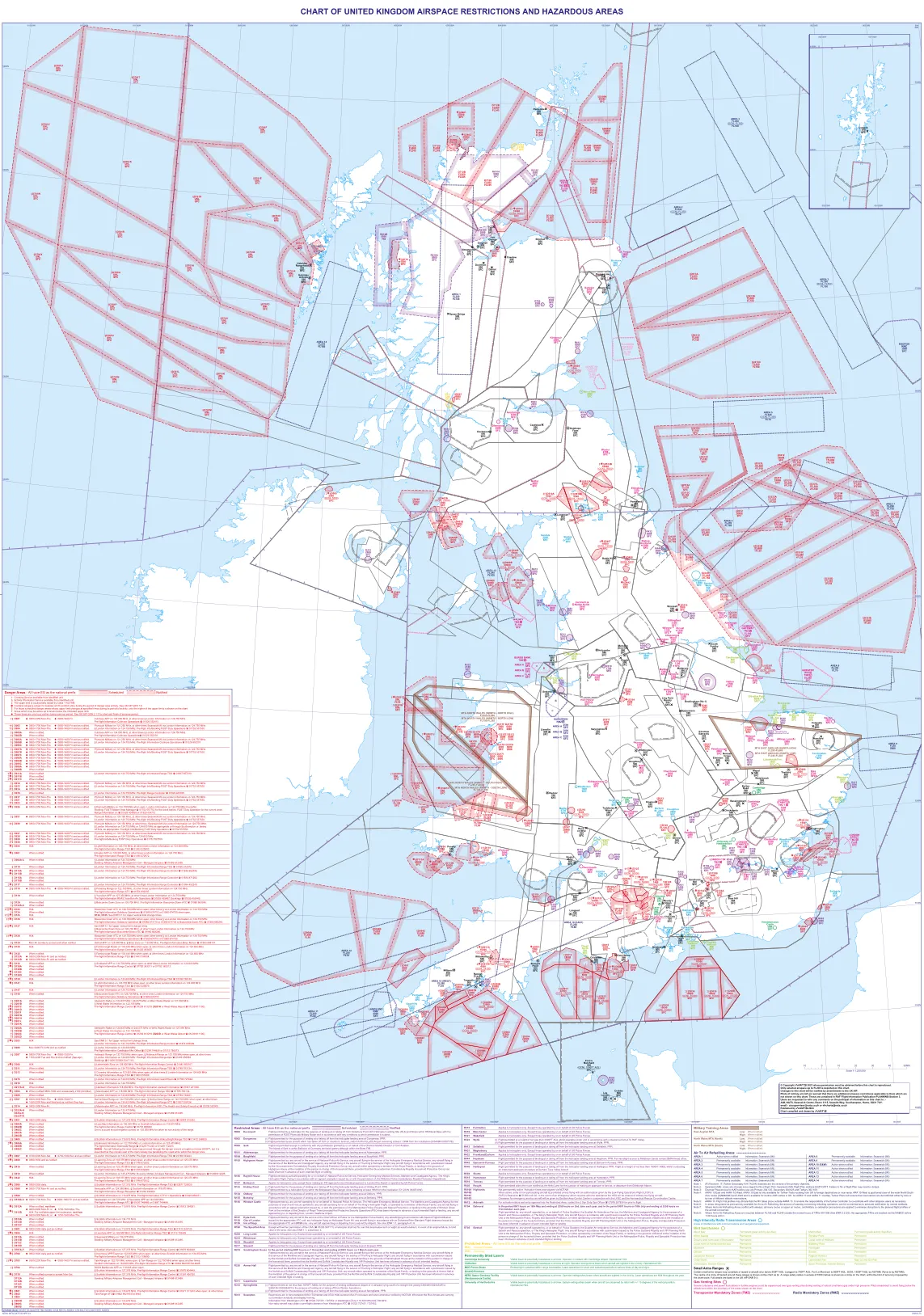
英国空域图... - NATS UK
在那里的住户,前提是诺福克和萨福克郡警察皇室和贵宾保护组已提前获悉此类预定降落。 由诺福克和萨福克郡警察皇室和贵宾保护组; 应海事和海岸警卫局服务负责人的邀请,在桑德灵厄姆府邸降落的任何飞机; 为国王直升机飞行服务飞行的任何飞机; 按照以下许可证飞行的任何飞机: 为国家警察航空服务服务的任何飞机; 为直升机紧急医疗服务服务飞行的任何飞机; 每年 12 月 1 日 0001 时开始至 3 月 1 日 0001 时结束期间飞行的任何飞机。 桑德灵厄姆府 R219
GS Yuasa LSE12x 电池和电池组更新已准备好......
GS Yuasa 是航天器锂离子储能领域的全球领导者 卫星数量…………...… 245+ − LEO/MEO……………….. 112+ − GEO……………………… 132 − 行星际…………… 1+ 第 1 颗在轨卫星…….………………..… Servis 1(2003 年 10 月 30 日) 在轨时间最长的卫星(年)…............. >18 年(IPSTAR,2005 年 8 月 11 日)仍在运行 太空飞行的锂离子瓦时….... >4.96 MWh(世界领先) 太空飞行的电池小时数………….. >6.19 亿小时 空间电池鉴定计划………. >27 飞行的电池尺寸(Ah)…........................ 35;50;55;100;102;110;134;145;175; 190;200 迄今为止的性能…………................. 无故障 积压(Wh)………….….……………… >1.04 MWh
检测现存外星微生物的成像技术和策略
摘要 生命没有简化的定义,因此生物的外观、行为和移动方式是识别外星生命的最明确方法。太阳系其他地方的生命可能是微生物,但从未有能够对原核生命进行成像的显微镜在着陆器任务中飞向可居住星球。尽管如此,已经开发出适合行星探索的高分辨率显微镜。传统光学显微镜、干涉显微镜、光场显微镜、扫描探针显微镜和电子显微镜都是检测火星和木星和土星卫星上现存微生物的可能技术。本文首先对寻找原核生命所涉及的挑战进行了一般性讨论,然后回顾了已经飞行的仪器、已选择飞行但未飞行或尚未飞行的仪器,以及尚未选择飞行的用于生命探测的有巨大前景的开发技术。

为所有人类的太空探索发展
•自1998年以来,CMS已在4批中选择了49名宇航员(44个活跃)。•中国已经成功完成了11项人类太空任务,总数有29人/次进入太空,创造了在轨道上最长的中国宇航员在轨道上连续飞行的记录183天•Yang Liwei是第一批中国飞行的宇航员。•Jing Haipeng是飞行任务的记录守护者(4次)•Liu Yang是第一个进入空间的中国女宇航员。