XiaoMi-AI文件搜索系统
World File Search System4V
BQ3060 SBS 1.1符合cedv
BQ3060在从Ti发货之前校准用于电压。将为每个单元校准BQ3060电压测量信号链(ADC,高压翻译,电路互连)。从每个单元连接到BQ3060的VCX输入的外部过滤器电阻必须为1KΩ。在4V电池电压下,在室温下,工厂校准设备的精度为+/- 10mV。没有任何客户电压校准,只要过滤器电阻值为1kΩ,这就是预期的准确度。如果需要更好的电压精度,则需要客户电压校准。有关校准和编程的应用程序说明BQ3060在产品Web文件夹中可用。有关更多详细信息,请参见数据闪存编程和校准BQ3060加油表(SLUA502)。


IP6802
● 支持最新 WPC 标准 支持 Qi 协议 BPP、EPP、QI2.0 MPP 认证 ● 工作电压 4V~20V ● 支持高达 30W 应用 ● 支持 5~15W 多种应用 功率向下兼容 ● 集成 H 桥驱动 ● 集成内部电压&电流解调 ● 支持 FOD 异物检测功能 静态 FOD 检测 动态 FOD 检测 ● 支持外置无源晶振 ● 支持 CBB/NPO 电容 ● 支持 Q 值检测 ● 用于 USB 电源供电不足的动态电源管理(DPM) ● 输入过压、过流、欠压、NTC 过温保护功能 ● 集成 32KB MTP,支持重复固件升级 ● 支持 PD3.0,以及多种 DP&DM 快充协议 ● 封装 5 mm×5 mm 0.5pitch QFN32
Ubicomp 2002 附属会议论文集
简介 要成功实现完全普适计算,每个计算节点都必须能够在没有用户干预的情况下运行。对于需要体积小巧且可移动的计算节点,实现此目标的主要障碍是需要连续的电源。尽管对微电池的研究仍在继续,但这种电源只能容纳有限的能量。目前的薄膜微电池在 4V 左右时只能达到 65 µ Ah/cm 2 的容量(每单位面积的硅)[3]。一个更有吸引力的解决方案是让节点从其环境中获取能量,形成一个自供电系统。这种能量可以是太阳能 [2]、热梯度或某种形式的运动 [1]、[4]。本文对基于运动的主要类型的微型发电机架构进行了比较。这些运动装置将环境机械振动转换为电能,供超低功耗电子设备(例如计算工件)使用。
Hi-Rel 解决方案 - KAMAKA Electronic GmbH
抗辐射功率 MOSFET(CoolMOS™ 技术) 100V、150V、250V,SMD-0.5、SMD-2、TO-254AA、TO-257AA TID>100Krads(可根据要求提供 300Krads),SEE >LET 55 / 85 MeV “SAM” 为电气功能样品 “P” 为面包板和 EM 上使用的专业级 “ES” 为 ESA 空间级,用于完全合格的卫星飞行模块 微波晶体管 硅双极晶体管技术 额定电源电压从 4V 到 12V 输出功率从 20mA 到 150mA 转换频率从 6.5GHz 到 42GHz 微波硅二极管 小信号、肖特基和 PIN 二极管 I Fmax= 120mA 至 5A,V BR= 40V 至 150V,R F= 0.9Ω 至 10Ω可提供芯片(裸片) 客户特定筛选 抗辐射功率 MOS、MW 晶体管 ESA 资格 ESCC 合格产品 所有产品均在欧洲生产 - 无需出口许可证


使用GPT-4V
摘要 - 在开放环境中的自动驾驶机器人导航和操纵需要推理并通过闭环反馈进行重新掌握。我们提出了Come-Robot,这是使用GPT-4V视觉基础模型的第一个闭环框架,用于在现实世界中的开放式推理和自适应计划。我们精心构建了一个用于机器人探索,导航和操纵的动作原始库,在任务计划中用作GPT-4V的可呼叫执行模块。在这些模块的顶部,GPT-4V充当可以完成多模式推理的大脑,使用代码生成动作策略,验证任务进度并提供用于重新启动的反馈。这样的设计使得 - 机器人能够(i)积极地感知环境,(ii)执行定位的过程,以及(iii)从失败中恢复。通过涉及8个挑战现实桌面和操纵任务的全面实验,与现状的基线方法相比,任务成功率显着提高(25%)我们进一步进行全面的分析,以阐明演员的设计如何促进故障恢复,自由形式的指导跟随和长期地平线任务计划。
HPV 疫苗对接受锥切术的女性的功效、效果和安全性:系统评价和荟萃分析
2v 二价 9v 无价 4v 四价 AIS 原位腺癌 CI 置信区间 CIN 宫颈上皮内瘤变 CIS 原位癌 CKC 冷刀锥切术 GRADE 建议、评估、制定和评价的分级 HPV 人乳头瘤病毒 HSIL 高级别鳞状上皮内病变 ITT 意向治疗 IRR 发病率比 LEEP 环电外科切除术 LLETZ 转化区大环切除术 LSIL 低级别鳞状上皮内病变 NETZ 转化区针切除术 NITAG 国家免疫技术顾问组 NRSI 干预效果的非随机研究 OR 比值比 PRESS 电子检索策略的同行评审 RCT 随机对照试验 RD 风险差异 RoB 偏倚风险 ROBINS-I 非随机研究中的偏倚风险干预措施 RR 风险比 SWETZ 直丝切除转化区 VaIN 阴道上皮内瘤变 VE 疫苗效力 (RCT) 或有效性 (NRSI) VIN 外阴上皮内瘤变 WHO 世界卫生组织
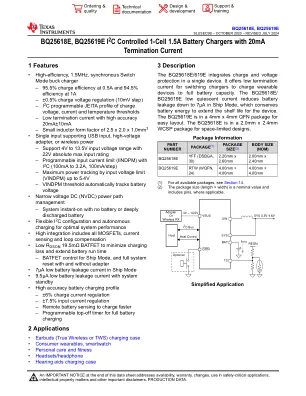
BQ25618E,BQ25619E I2C控制1-Cell 1.5A电池...
•支持USB输入,高压适配器或无线功率的单个输入 - 支持4V至13.5V输入电压范围为22V绝对最大输入评级 - 可编程输入电流限制(IINDPM),I 2 C(100mA至3.2a,100mA/100mA/100mA/100mA/100ma/a tracks battery voltage • Narrow voltage DC (NVDC) power path management – System instant-on with no battery or deeply discharged battery • Flexible I 2 C configuration and autonomous charging for optimal system performance • High integration includes all MOSFETs, current sensing and loop compensation • Low R DSON 19.5mΩ BATFET to minimize charging loss and extend battery run time – BATFET control for Ship Mode, and full system reset with and without适配器•7µA电池模式下电池模式下的低电池泄漏电流•9.5µA电池泄漏电流带有系统备用•高精度电池充电概况 - ±6%充电电流调节 - ±7.5%的输入电流调节 - 远程电池感测至更快的电池 - 可编程的顶级电池,用于完整电池充电