XiaoMi-AI文件搜索系统
World File Search SystemAda

卡塔利娜·罗萨莱斯中校
罗萨莱斯中校此前的职务包括发射/火控排长(5-52 防空导弹 (AMD) 营 (Bn))、火力指挥主管(5-52 AMD 营)、ADAFCO 主管(第 11 ADA 旅 (Bde)、指挥官(阿尔法炮台,2-43 ADA 营)、参谋长联席会议主席公共事务特别助理的情报 (J2) / 行动 (J3) 规划师、陆军总部 (HQDA) 首席立法联络办公室下属的美国众议院立法联络员、营作战官 (S3)(1-7 ADA 营)、营执行官(1-7 ADA 营)、旅 S3(第 108 ADA 旅)、ADA 组织整合员(HQDA 副参谋长 G-3/5/7 部队管理局)和部门主管(联合参谋部 J8 联合综合防空反导组织)。

妊娠:糖尿病护理标准 — 2023 年 - Pregna.kz
美国糖尿病协会 (ADA)“糖尿病护理标准”包括 ADA 当前的临床实践建议,旨在提供糖尿病护理的组成部分、一般治疗目标和指南以及评估护理质量的工具。ADA 专业实践委员会是一个多学科专家委员会,其成员负责每年或根据需要更频繁地更新护理标准。有关 ADA 标准、声明和报告的详细描述,以及 ADA 临床实践建议的证据分级系统和专业实践委员会成员的完整名单,请参阅简介和方法。希望对护理标准发表评论的读者请访问 professional.diabetes.org/SOC。

糖尿病的护理标准-2023
美国糖尿病协会(ADA)“糖尿病中的护理标准”介绍了ADA当前的临床实践建议,旨在提供糖尿病护理的组成部分,一般治疗目标和指南,以及评估护理质量的工具。多学科专家委员会ADA专业实践委员会成员负责每年提高护理标准,或更频繁地按照保证。有关ADA标准,声明和报告的描述,以及ADA临床实践建议的证据授予系统以及专业实践委员会成员的完整列表,请参阅介绍和方法论。希望在Profession.diabetes.org/soc上邀请您对护理标准发表评论的读者。

糖尿病的护理标准-2023-沙龙博士见
美国糖尿病协会(ADA)“糖尿病中的护理标准”介绍了ADA当前的临床实践建议,旨在提供糖尿病护理的组成部分,一般治疗目标和指南,以及评估护理质量的工具。多学科专家委员会ADA专业实践委员会成员负责每年提高护理标准,或更频繁地按照保证。有关ADA标准,声明和报告的描述,以及ADA临床实践建议的证据授予系统以及专业实践委员会成员的完整列表,请参阅介绍和方法论。希望在Profession.diabetes.org/soc上邀请您对护理标准发表评论的读者。

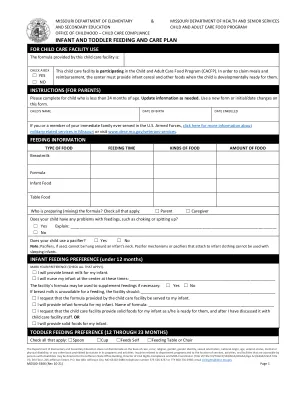
呼吸酒精操作员手册
基础和中等教育部并未根据种族,颜色,宗教,性别,性别认同,性取向,国籍,年龄,老年,精神或身体残疾或任何其他基础在其计划和活动中禁止的任何其他基础。询问与部门计划以及残疾人可访问的服务,活动和设施的位置有关,可以直接送达杰斐逊州立办公室大楼,民权合规总监和MOA协调员(标题VI/Title VI/Title vii/Title IX/504/504/ADA/ADA/ADA/ADA/ADAA/ADAA/ADAA/ADAA/ADA/ADA ACT/GIAN/GINA/ACT/GINA/USDA街道,p。Box 480,Jefferson City,MO 65102-0480;电话号码573-526-4757或TTY 800-735-2966;发送电子邮件至nivelRights@dese.mo.gov。 MO500-3306(Rev 10-21)第1页Box 480,Jefferson City,MO 65102-0480;电话号码573-526-4757或TTY 800-735-2966;发送电子邮件至nivelRights@dese.mo.gov。MO500-3306(Rev 10-21)第1页
1 绿色创新生态系统建立...
Vu Kien Phuc 2 摘要 目标:本研究旨在调查内部控制系统 (ICS) 与会计数据分析 (ADA) 之间的关系。本研究还研究了 ICS 和 ADA 如何影响绿色创新生态系统 (GIE)。此外,它还致力于探索数字循环商业模式创新 (DCBMI) 在 ICS、ADA 和 GIE 之间的联系中的中介机制。 理论框架:借鉴实践视角理论,本研究重点关注几个构造及其相互联系,即 ICS、ADA、GIE 和 DCBMI。 方法:本研究采用假设演绎法。该研究利用结构方程模型来检验所提出的模型,该模型基于对 523 名公共部门组织 (PSO) 会计师的横断面调查获得的统计数据。 结果与讨论:结果证实了 ICS 和 ADA 之间存在明显的正相关关系。此外,还证实了 GIE 受到 ICS 和 ADA 的影响。同时,这些互连部分由 DCBMI 介导。研究意义:这些观察结果为 PSO 领导者提供了指南,帮助他们识别和利用机会,在数字化转型过程中发挥作用,并制定强有力的战略来有效指导他们的绿色创新过程。原创性/价值:它还通过提供有关 ICS 和 ADA 对发展中国家 PSO 内 GIE 影响的实证证据,扩大了有关 GIE 的文献范围。引人注目的是,这项调查的原创性在于研究 DCBMI 对 ICS 和 GIE 以及 ADA 和 GIE 之间相互联系的中介作用。关键词:会计信息系统、商业模式创新、循环经济、数据分析、生态系统、绿色创新。
访谈:太空问答 - Eric Perlade,技术......
Ada 可读性强,语法清晰,能够传达程序意图并避免陷阱和缺陷,并且具有其他语言未指定的运行时行为的明确语义。Ada 支持模块化软件架构,其软件包功能将规范与实现分开。对于必须禁用某些 Ada 检查的低级编程,语言功能具有明确的语法(“未检查”前缀),使人类读者能够清楚地了解它们的用法。所有这些使得 Ada 成为需要维护多年项目时的绝佳选择。
ICOI 高级种植课程
ICOI 是 ADA CERP 认可的提供商。ADA CERP 是美国牙科协会的一项服务,旨在帮助牙科专业人士识别继续牙科教育的优质提供商。ADA CERP 不批准或认可个别课程或讲师,也不意味着牙科委员会接受学分。对 CE 提供商的疑虑或投诉可直接向提供商或 CCEPR.ada.org 上的继续教育提供商认可委员会提出。
2025-ABSTRACT-MUBSISPRISION-GUIDELINES- ...
所有会议的与会者,媒体,公司,机构,组织,大学,投资顾问和所有其他人都必须遵守管理美国糖尿病协会(ADA)的第83条科学会议的禁运政策。禁运是指任何摘要或演示的信息都是机密的,并且不得在禁运日期和时间之前宣布,宣传或分发。此政策适用于所有发布格式,包括在线行程计划师,会议应用程序,USB上的摘要,通过ADA网站在线提供的摘要以及任何其他分发方法。禁运政策的目的是保护ADA科学会议上提出的抽象提交的科学完整性。所有提交的内容均应被视为初步,直到演示时间或授权公开释放。通过在禁运日期和时间之前发布任何摘要中包含的任何信息,违反了禁运政策,将导致个人以及雇主/关联公司,机构,组织等从ADA的第82届科学会议中删除,并以两年的返回禁令中删除。事先出版:如果也将接受的摘要作为出版物提交,则作者负责协调遵守ADA的禁运政策的出版日期。如果出版在线或在ADA设定的特定禁运日期和时间之前在线上进行打印,则必须撤回摘要。通过abractips@diabetes.org通过电子邮件通知ADA。