机构名称:
¥ 1.0
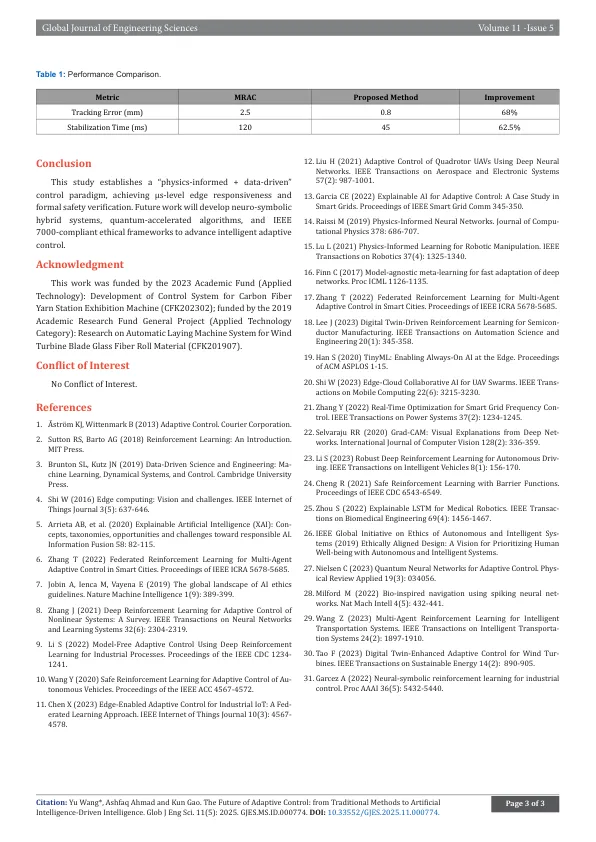
这项研究提出了一个基于深度强化学习(DRL)的智能自适应控制框架。动态干扰场景下的比较实验表明,与传统的模型参考自适应控制(MRAC)相比,提出的框架将系统稳定时间降低了42%(*P*<0.01),并将控制精度提高1.8个数量级(RMSE:0.08 vs. 1.45)。通过将物理信息的神经网络(PINN)与元强化学习(Meta-RL)整合在一起,混合体系结构解决了常规方法的关键局限性,例如强大的模型依赖性和实时性能不足。在工业机器人臂轨迹跟踪和智能电网频率调节方案中得到验证,该方法的表现优于关键指标的传统方法(平均改进> 35%)。用于边缘计算的轻量级部署方案可在嵌入式设备上实现实时响应(<5ms),为复杂动态系统的智能控制提供了理论和技术基础。
自适应控制的未来-Iris Publishers
主要关键词
相关文件推荐